Digitálne spracovanie signálu
Téma 11. ADAPTÍVNE FILTROVANIE DIGITÁLNYCH ÚDAJOV
Nech sa snažia podriadiť okolnostiam a nie sami sa im podriaďovať.
Horace. Správy. Rímsky básnik, 1. storočie po Kr
Ak v tejto teórii nevidíte zmysel, tým lepšie. Vysvetlivky môžete preskočiť a začať to hneď používať v praxi.
Valentín Rovinský. Teória kartových hier.
Kyjevský geofyzik Uralskej školy, XX storočia.
Obsah
Úvod.
1. Všeobecné informácie o adaptívnych. Hlavné oblasti použitia. Adaptívny squelch. Adaptívny Wienerov filter. Adaptívny algoritmus Widrow-Hopfove najmenšie štvorce. Rekurzívne schémy najmenších štvorcov.
2. Základy štatistického zoskupovania informácií. Predpoklady metódy. Problém štatistického zoskupovania. Použitie a priori údajov. Účinnosť metódy.
Štatistická regularizácia údajov. Overenie teoretických ustanovení metódy. Hodnotenie zachovania rozlíšenia. Štatistické vyhodnotenie regularizácia údajov. Výsledky simulácie. frekvenčné znázornenie. Príklad praktické využitie.
4. Štatistické zoskupovanie užitočná informácia. Podstata hardvérovej implementácie. Vlastnosti hardvérovej implementácie. Implementácia informačných zoskupovacích systémov. Príklad spustenia systému informačného zoskupovania.
Úvod
V tradičných metódach spracovania údajov sa informácie získavajú zo vstupných signálov. lineárne systémy s konštantnými parametrami algoritmov transformácie údajov. Systémy môžu mať konečnú aj nekonečnú impulznú odozvu, ale prenosová funkcia systémov nezávisí od parametrov vstupných signálov a ich zmeny v čase.
Zariadenia na adaptívne spracovanie údajov sa vyznačujú prítomnosťou určitého spojenia medzi parametrami prenosovej funkcie a parametrami vstupných, výstupných, očakávaných, predpovedaných a iných dodatočných signálov alebo s parametrami ich štatistických vzťahov, čo umožňuje samočinné ladenie pre optimálne spracovanie signálu. V najjednoduchšom prípade adaptívne zariadenie obsahuje programovateľný filter spracovania dát a adaptačný blok (algoritmus), ktorý na základe konkrétny program analýza vstupných, výstupných a iných dodatočných údajov generuje riadiaci signál pre parametre programovateľného filtra. impulzná odozva adaptívne systémy môže byť aj konečný alebo nekonečný.
Adaptívne zariadenia sa spravidla vykonávajú s úzkoúčelovým funkčným účelom pre určité typy signálov. Vnútorná štruktúra adaptívne systémy a adaptačný algoritmus sú takmer úplne regulované funkčný účel a určité minimálne množstvo počiatočných a priori informácií o charaktere vstupných údajov a ich štatistických a informačných parametroch. Vzniká tak rôznorodosť prístupov pri vývoji systémov, výrazne sa sťažuje ich klasifikácia a vývoj všeobecných teoretických ustanovení /l38/. Je však možné poznamenať, že pri vývoji systémov na adaptívne spracovanie signálov nachádzajú najväčšie uplatnenie dva prístupy: založené na schéme najmenších štvorcov (LSS) a rekurzívnej schéme najmenších štvorcov (RSLS).
^ 11.1. VŠEOBECNÉ INFORMÁCIE O ADAPTÍVNOM DIGITÁLNOM FILTROVANÍ .
Hlavné aplikácie adaptívne filtrovanie - čistenie dát od nestabilných rušivých signálov a šumu prekrývajúceho sa v spektre so spektrom užitočných signálov, alebo keď je rušivé frekvenčné pásmo neznáme, premenlivé a nemožno ho a priori nastaviť pre výpočet parametrických filtrov. Takže napríklad pri digitálnej komunikácii môže silné aktívne rušenie rušiť užitočný signál a počas prenosu digitálne informácie na kanáloch so zlými frekvenčnými charakteristikami možno pozorovať medzisymbolové rušenie digitálnych kódov. Efektívne riešenie Tieto problémy sú možné len s adaptívnymi filtrami.
Frekvenčná odozva adaptívnych filtrov sa automaticky upravuje alebo upravuje podľa určité kritériá, čo umožňuje filtru prispôsobiť sa zmenám v charakteristikách vstupného signálu. Sú pomerne široko používané v rádiách a sonaroch, v navigačných systémoch, pri extrakcii biomedicínskych signálov a v mnohých ďalších odvetviach techniky. Ako príklad zvážte najbežnejšie schémy adaptívneho filtrovania signálu.
Adaptívny squelch . Bloková schéma filtra je znázornená na obr. 11.1.1.
Ryža. 11.1.1.
Filter pozostáva z digitálneho bloku filtra s nastaviteľnými koeficientmi a adaptívneho algoritmu na úpravu a zmenu koeficientov filtra. Filter prijíma vstupné signály y(k) a x(k) súčasne. Signál y(k) obsahuje užitočný signál s(k) a znečisťujúci signál g(k) s ním nekorelovaný. Signál x(k) nejakého zdroja šumu koreluje s g(k) a používa sa na vytvorenie odhadu signálu ğ(k). Užitočný signál sa odhaduje na základe rozdielu:
š(k) = y(k) – ğ(k) = s(k) + g(k) – ğ(k). (11.1.1)
Odmocnime rovnicu a dostaneme:
š 2 (k) = s 2 (k) + (g(k) – ğ(k)) 2 + 2.s(k) (g(k) – ğ(k)). (11.1.2)
Vypočítajme matematické očakávanie ľavej a pravej strany tejto rovnice:
M[š2(k)] = M + M[(g(k) – ğ(k))2] + 2M. (11.1.3)
Posledný člen vo výraze je rovný nule, pretože signál s(k) nekoreluje so signálmi g(k) a ğ(k).
M[š2(k)] = M + M[(g(k) – ğ(k))2]. (11.1.4)
V tomto výraze M = W(s(k)) je výkon signálu s(k), M[š 2 (k)] = W(š(k)) je odhad výkonu signálu s(k) ) a celkom výstupný výkon, M[(g(k) – ğ(k)) 2 ] = W( g) - výkon zvyškového šumu, ktorý môže byť obsiahnutý vo výstupnom signáli. Pri nastavovaní adaptívny filter do optimálnej polohy sa minimalizuje výkon zvyškového šumu a tým aj výkon výstupného signálu:
Min W(š(k)) = W(s(k)) + min W( g). (11.1.5)
Nastavenie neovplyvňuje silu užitočného signálu, pretože signál nie je v korelácii so šumom. Účinok minimalizácie celkového výstupného výkonu sa prejaví maximalizáciou pomeru výstupného signálu k šumu. Ak nastavenie filtra poskytuje rovnosť ğ(k) = g(k), potom š(k) = s(k). Ak signál neobsahuje šum, adaptívny algoritmus by mal nastaviť všetky koeficienty digitálneho filtra na nulu.

Ryža. 11.1.2.
Adaptívny Wienerov filter
. Vstupný signál y(k) filtra znázorneného na obr. 11.1.2 obsahuje zložku korelovanú s druhým signálom x(k) a užitočnú zložku nekorelovanú s x(k). Filter generuje z x(t) signál ğ(k) - optimálny odhad tej časti y(k), ktorý koreluje s x(k), a odčíta ho od signálu y(k). Výstupný signál:
E(k) = y(k) - ğ(k) = y(k) - H T X k = y(k) -  h(n) x(k-n),
h(n) x(k-n),
Kde H T a X k sú váhové vektory filtra a jeho vstupného signálu.
Podobne ako v predchádzajúcej metóde odmocníme ľavú a pravú stranu rovnice, nájdeme matematické očakávania oboch strán a získame optimalizačnú rovnicu výstupného signálu:
2 P T H + H T RH, (11.1.6)
Kde 2 = M je rozptyl y(k), P= M - vektor krížová korelácia, R= M[ X k X k T ] je autokorelačná matica.

Ryža. 11.1.3.
V stacionárnom prostredí je graf závislosti od koeficientov H je miskovitého tvaru adaptačný povrch(obr. 11.1.3). Gradient povrchu:
d / d H = -2P + 2RH.
Každá množina koeficientov h(n) na tejto ploche zodpovedá určitému bodu. V minimálnom bode je gradient nula a vektor hmotnosti filtra je optimálny:
H opt = R -1 P. (11.1.7)
Tento vzorec sa nazýva Wiener-Hopfova rovnica. Úlohou automatického ladiaceho algoritmu je vybrať také hmotnosti filtrov, ktoré zabezpečia prevádzku v optimálnom bode adaptačnej plochy.
Avšak praktické využitie Filtru bráni použitie korelačných matíc R a P, ktoré sú a priori neznáme a ktoré sa môžu časom meniť pre nestacionárne signály.
Adaptívne metódy najmenších štvorcov Widrow-Hopf . V podstate ide o modifikáciu Wienerovho filtra, v ktorej namiesto výpočtu koeficientov (11.1.7) v jednom kroku sa pri spracovaní každej vzorky používa algoritmus postupného zostupu do optimálneho bodu:
H k+1 = H k - e k X k , (11.1.8)
E k = y k - H T X k . (11.1.9)
Podmienka konvergencie k optimu:
0 < >1/ max , (11.1.10)
Kde je parameter rýchlosti zostupu, ma ax je maximum vlastná hodnotaúdaje kovariančnej matice. Bloková schéma algoritmu je znázornená na obr. 11.1.4.
Ryža. 11.1.4. Adaptačný algoritmus metódou najmenších štvorcov.
V praxi bod maximálnej optimality kolíše okolo teoreticky možného bodu. Ak je vstupný signál nestacionárny, potom zmena v štatistike signálu musí byť dostatočne pomalá, aby koeficienty filtra mali čas sledovať tieto zmeny.
Rekurzívne schémy najmenších štvorcov sa líšia tým, že výpočet každej nasledujúcej vzorky koeficientov h(n) sa vykonáva nielen pomocou koeficientov iba jednej predchádzajúcej vzorky, ale aj s určitou dĺžkou postupne sa rozpadajúcej pamäte pre predchádzajúce vzorky, čo umožňuje znížiť kolísanie odhadov pri spracovaní stacionárnych signálov.
^ 11.2. Základy štatistického zoskupovania informácií.
Pri budovaní adaptívnych systémov filtrovania údajov sa štatistické charakteristiky spracovávaných signálov a šumov, ich stacionárnosť a prítomnosť akýchkoľvek Ďalšie informácie koreluje s hlavným. Možnosť využitia dodatočných informácií pri konštrukcii adaptívnych systémov bude zvážená na konkrétnom príklade – systéme adaptívnej filtrácie dát z kontinuálnych jadrových geofyzikálnych meraní.
Predpoklady metódy. Fyzikálna veličina zaznamenávaná v procese jadrovo-fyzikálnych meraní v geofyzike je zvyčajne frekvencia impulzných signálov na výstupe detektorov ionizujúceho žiarenia v integrálnom alebo diferenciálnom režime výberu amplitúdy. Hodnoty meranej veličiny, keďže sú v prírode štatisticky rozdelené, je možné určiť len spriemerovaním počtu registrácií ionizujúcich častíc v časových intervaloch. Registrovaný počet impulzov určuje štatistickú chybu jedného merania a časový interval spriemerovania, ktorý poskytuje štandardnú chybu, určuje ich výkonnosť. Pri metódach s kontinuálnym zaznamenávaním informácií v čase (resp. v priestore) určuje časové okno meraní aj časové (resp. priestorové, s prihliadnutím na rýchlosť pohybu detektora) rozlíšenie interpretácie výsledkov merania, pričom efektívnosť zaznamenávania informácií je zvyčajne obmedzená podmienkami meraní a/alebo technickými prostriedkami ich vykonávania. Typickým príkladom je protokolovanie studní, kde sú možnosti zvyšovania intenzity informačných tokov limitované parametrami účinnosti registrácie a citlivosti detektorov žiarenia, ktoré závisia od ich typu a veľkosti. Rozmery detektorov samozrejme výrazne závisia od rozmerov vrtných nástrojov, ktoré sú zase obmedzené priemermi vrtov.
Nižšie uvažujeme o možnosti zvýšenia presnosti a produktivity kontinuálnych jadrovo-fyzikálnych meraní, pre prehľadnosť, vo vzťahu k podmienkam merania vo variante hĺbkového odberu gama, aj keď ho možno v rovnakej miere použiť v auto- a vzdušnom gama prieskumy, v rádiometrickom obohacovaní rúd, v röntgenovej rádiometrii a iných metódach jadrovej geofyziky. Predpokladá sa, že údaje sú zaznamenané v digitálnej podobe s akumuláciou nameraných hodnôt počas konštantných intervalov vzorkovania údajov (v čase a priestore za predpokladu, že sa detektor pohybuje konštantnou rýchlosťou).
AT všeobecný prípad užitočná (cieľová) informácia môže byť prítomná vo viacerých energetických intervaloch spektra žiarenia. Pracovné meracie intervaly sa zvyčajne považujú za časti spektra, kde sú užitočné informácie prítomné v „čistej“ forme alebo zmiešané so šumom (pozadie), ktorých hodnotu je možné zohľadniť pri spracovaní výsledkov merania. Takže napríklad pri gama testovaní hornín na obsah prírodných rádionuklidov (NRN) sa zaznamenáva žiarenie s energiou vyššou ako 250-300 keV, reprezentované najmä primárnymi a jednotlivo rozptýlenými kvantami, ktorých hustota toku je úmerná k hmotnostnému zlomku NRN v horninách. Hustota toku žiarenia v nízkoenergetickom rozsahu spektra (20-250 keV, hlavne viacnásobne rozptýlené žiarenie) závisí aj od hmotnostného zlomku NRN, ale táto závislosť parametricky súvisí s efektívnym atómovým číslom emitujúceho-absorbujúceho média v oblasť detektora, ktorej variácie pozdĺž vrtu môžu viesť k veľkej chybe pri interpretácii výsledkov merania. Hustota informačného toku (vzhľadom na hmotnostný zlomok NRN) v rozsahu 20-250 keV je pritom oveľa vyššia ako v rozsahu viac ako 250 keV, najmä pri detekcii žiarenia maloobjemovými scintilačnými detektormi, ktoré majú zvýšenú citlivosť špecificky na nízkoenergetickú časť spektra žiarenia .
Úloha štatistického zoskupovania informácie v tokoch signálov možno formulovať vo všeobecnej a najjednoduchšej forme nasledujúcim spôsobom. Užitočná informácia je prítomná v dvoch štatisticky nezávislých signálových tokoch (v dvoch neprekrývajúcich sa intervaloch emisného spektra). V prvom toku signálu sú podmienene základné, užitočné informácie prítomné v „čistej“ forme: hustota toku signálu je úmerná určenému fyzikálne množstvo. V druhom prúde sú podmienečne dodatočné užitočné informácie prekryté vplyvom destabilizujúcich faktorov, ktorých význam nie je známy. Pri absencii destabilizačných faktorov je korelačný koeficient priemerných hodnôt hustôt toku v týchto dvoch signálových tokoch konštantný a blízky 1. Na zníženie štatistickej chyby merania je potrebné extrahovať užitočné informácie z dodatočného signálu. stream a zrátajte to s hlavným streamom.
Označme toky, ako aj frekvencie hlavných a doplnkových signálových tokov indexmi n a m (impulzy za sekundu), spojenie tokov frekvenciami indexom x = m/n. Je potrebné určiť prietokovú frekvenciu n. Hodnota x sa môže meniť vplyvom destabilizačných faktorov na prietok m a vo všeobecnosti ide o náhodnú veličinu rozloženú podľa určitého zákona s hustotou pravdepodobnosti P(x), matematickým očakávaním a rozptylom D x .
Na základe Bayesovej vety je hustota pravdepodobnosti frekvenčného rozdelenia n podľa počtu vzoriek signálu N nameraných za jednotkový interval t určená výrazom:
P N (n) = P (n) P n (N) P (N), (11.2.1)
P n (N) = (nТ) N e -n N! , (11.2.2)
P(N) =  P n (N) P (n) dn, (11.2.3)
P n (N) P (n) dn, (11.2.3)
Kde: P(n) - apriórna hustota pravdepodobnosti frekvencie n, P n (N) - aposteriórne rozdelenie pravdepodobnosti numerických vzoriek N (Poissonov zákon). V budúcnosti vziať ako požadovanú hodnotu hodnoty vzoriek z=n v intervaloch (expozícia digitálnych vzoriek alebo posuvné časové okno analógových dát) a dosadiť (11.2.2, 11.2.3) do (11.2. 1), získame:
P N (z) = P (z) z N e -z  P(z) z N e -z dz. (11.2.4)
P(z) z N e -z dz. (11.2.4)
Pri neznámom rozdelení hodnôt z sa predpokladá, že hustota apriórneho rozdelenia P(z) je rovnomerná od 0 do a z výrazu (11.2.4) vyplývajú dobre známe výrazy:
Z = D z = N+1 N, (11.2.5)
z 2 = D z z 2 = 1 (N+1) 1N. (11.2.6)
Zanedbávame hodnoty jednotiek vo výrazoch, čo je nielen správne v podmienkach „dobrej“ štatistiky, ale aj nevyhnutné v režime postupných kontinuálnych meraní na elimináciu skreslenia priemerných hodnôt.
Ako vyplýva z teórie logovania gama žiarenia (GK) a celkom dobre potvrdené praxou odberu vzoriek gama žiarenia, priestorové rozlíšenie meraní gama žiarenia pri interpretácii výsledkov GK pre obsah prírodných rádioaktívnych prvkov v horninách pozdĺž vrt je v priemere 10 cm a v malých vrtoch sa priemer môže zväčšiť dokonca až na 5-7 cm.. Realizácia takéhoto rozlíšenia je však možná len za podmienok dostatočne "dobrých" štatistík. Koeficient zosilnenia rozptylu šumu digitálnych dekonvolučných filtrov používaných pri interpretácii GC je v priemere asi 12 a mení sa od 4 do 25 v závislosti od hustoty horniny, priemeru vrtu, priemeru vrtného nástroja atď. Z toho vyplýva, že na dosiahnutie rozlíšenia 10 cm so štandardnou chybou diferenciálnej interpretácie nie väčšou ako 10-20%, štatistická chyba meraní by nemala presiahnuť 3-7%. A to zase určuje množstvo čítania pre jednu expozíciu najmenej 200-1000 impulzov. S gama žiarením je možné pri použití detektorov len pre horniny s relatívne vysokým obsahom NRN (viac ako 0,001 % ekvivalentu uránu). veľké veľkosti(s účinnosťou registrácie viac ako 10 impulzov/s na 1 μR/hod) a pri nízkej rýchlosti zaznamenávania (nie viac ako 100-300 m/hod). Tento problém je do určitej miery charakteristický pre všetky metódy jadrovej geofyziky a obzvlášť akútny je pri spektrometrických modifikáciách meraní.
Zároveň je potrebné poznamenať, že proces kontinuálnych meraní má určité fyzický základ jednak na aplikáciu metód na regularizáciu výsledkov interpretácie údajov, ako aj na priamu regularizáciu samotných štatistických údajov (polia vzoriek N) pri ich spracovaní.
Najjednoduchším spôsobom prípravy digitálnych dát na interpretáciu je ich nízkofrekvenčná filtrácia metódou najmenších štvorcov (LSM) alebo váhovými funkciami (Laplace-Gauss, Kaiser-Bessel atď.). Akékoľvek metódy nízkofrekvenčného filtrovania údajov však znižujú priestorové rozlíšenie interpretácie, pretože okrem zníženia štatistických fluktuácií vedú k určitej deformácii frekvenčných zložiek užitočnej časti signálu, ktorého spektrum, napr. podľa dekonvolučných podmienok by mala mať reálne hodnoty až do Nyquistovej frekvencie. Tento negatívny faktor je možné do určitej miery eliminovať metódou adaptívnej regulácie dát (ARD).
Vyjadrenia (11.2.5-6) sa získajú za predpokladu úplnej neistoty predchádzajúcej distribúcie P(z) pre hodnoty pri každej aktuálnej expozícii . Medzitým, keď sa spracovávajú kontinuálne namerané dáta a ešte viac zaznamenávané dáta, ktoré sú zvyčajne viacparametrové, pre každú aktuálnu vzorku, je možné počas spracovania dát vykonať určitý odhad rozdelenia P(z). Existujú aspoň dva spôsoby, ako odhadnúť rozdelenie P(z).
Metóda 1. Dátovými poľami paralelných meraní akýchkoľvek iných informačných parametrov, ktorých hodnoty celkom jasne korelujú so spracovávaným dátovým poľom, či už v celom meracom priestore, alebo v určitom posuvnom intervale porovnávania dát. Medzi takéto polia patria napríklad predbežné merania ťažby počas vŕtania studní, merania s iným nástrojom, s inou rýchlosťou ťažby, v inom spektrálnom rozsahu žiarenia a dokonca aj s inou metódou ťažby. Pri odbere gama vzoriek možno distribúciu P(z) odhadnúť z paralelných meraní intenzity prúdenia m in nízkofrekvenčný rozsah spektrum hornín.
Metóda 2. Pomocou jediného GK diagramu možno odhad distribúcie P(z) v každom aktuálnom bode spracovania údajov vykonať v najbližších susedstvách tohto bodu, pokrývajúc širší priestorový interval v porovnaní s intervalom vzorkovania.
Použitie a priori údajov. Predpokladajme, že okrem hlavného dátového poľa N , na spracovanie (pripravené na interpretáciu) máme dodatočné dátové pole M, ktorého hodnoty sú do určitej miery korelované s poľom N. Pri absencii ďalších polí nám metóda 2 umožňuje získať pole M spracovaním poľa N digitálny filter LSM (alebo akýkoľvek iný váhový filter) s posuvným časovým oknom T 3 (M(k) = m(k) vyhladeného signálu m(k) = n(k) ③ h, kde h je symetrický digitálny operátor filtra). Všimnite si tiež, že 2. metódu možno vždy použiť na regularizáciu údajov, bez ohľadu na dostupnosť údajov pre 1. metódu.
Pole M nám umožňuje odhadnúť štatistické charakteristiky rozdelenia P(z). Ak teda pre rovnaké časové intervaly v poli M sú vzorky M = m k (alebo vzorky nejakého iného parametra redukované na ne), potom môžeme napísať:
PM (z) =  , (11.2.7)
, (11.2.7)
Kde Р(х) je apriórna hustota rozdelenia hodnôt x k = m k / n k , ktorá môže byť vo všeobecnosti aj náhodná. o Rovnomerné rozdelenie P(x) od 0 do pre referenciu M je rovnako pravdepodobná akákoľvek hodnota z, t.j. nie je žiadny vplyv meraní v prietoku m. Podľa počiatočných podmienok problému však tok m vyžaduje prítomnosť užitočných informácií, a teda existencia aspoň určitých distribučných hraníc P(x) od x min > 0 do x max<< , и среднего значения по пространству измерений. При этом из выражения (11.2.7) следует, что наиболее вероятное значение z a , "априорное" для отсчетов z=n в потоке n по измерениям в потоке m (отсчетам М), должно быть равно:
Z a = (M+1) М. (11.2.8)
So štatistickou nezávislosťou hodnôt x a M je relatívna efektívna chyba pri určovaní hodnôt z a z hodnôt v poli M:
za 2 = M 2 + x 2. (11.2.9)
Preto rozptyl distribúcie hodnôt z a:
Dza = (D M + M 2 x 2) 2 = D(M) 2, (11.2.10)
D(M) = DM + M2 x 2 = DM + D xm, (11.2.11)
D M \u003d M + 1 M, D xm \u003d M 2 x 2,
Ak je hodnota rozptylu D M určená štatistikou vzoriek v poli M pri x = const, hodnota D xm je rozptyl hodnôt M v dôsledku kolísania x a súčtu D(M ) určuje celkový rozptyl vzoriek M.
Vplyv P(x) na tvar rozdelenia P M (z) ovplyvňuje jeho "natiahnutie" pozdĺž súradnice z vzhľadom na modálnu hodnotu, pričom riešenie integrálu (11.2.7) v prvej aproximácii možno znázorniť v nasledujúcej forme:
PM (z) b  e-bz. (11.2.12)
e-bz. (11.2.12)
Pre túto distribúciu:
 = z a = ab, (11.2.13)
= z a = ab, (11.2.13)
Dza = ab2, (11.2.14)
Berúc do úvahy výrazy (11.2.8) a (11.2.10):
A = MD M (D za 2) = MD M D(M), (11.2.15)
B = D M (D za ) = D M D(M). (11.2.16)
Hodnota "a" vo výraze (11.2.15) sa berie ako celé číslo. Výraz (11.2.12) možno brať pre rozdelenie (11.2.4) ako predchádzajúce rozdelenie pravdepodobnosti P(z), pričom:
PN (z) = (b+1)  e-z(b+1). (11.2.17)
e-z(b+1). (11.2.17)
Preto matematické očakávanie a rozptyl z:
Z = (N+a)(b+1), (11.2.18)
Dz = (N+a)(b+1) 2 . (11.2.19)
Používanie výrazov (11.2.15-16):
Z = N+(1-)M, (11.2.20)
Kde a (1-) sú váhové koeficienty spoľahlivosti odčítania N a M:
= D(M)(DN2+D(M)). (11.2.21)
Rozptyl a relatívna štandardná chyba meraní z:
Dz = D(M)  , (11.2.22)
, (11.2.22)
z 2 =1(N+MD M D(M)). (11.2.23)
Účinnosť metódy. Porovnanie výrazov (11.2.20-23) a (11.2.5-6) umožňuje odhadnúť efekt použitia dodatočných informácií z toku M, štatisticky nezávislých od N (ľubovoľné dodatočné informácie).
1. Keď nastane const, x 2 0, D xm 0 a rozptyl vzoriek v poli M je určený iba štatistikou toku:
D(M) D M = M, z = (N+M) (+1),
z 2 1 (N+M)< N 2 = 1N, (11.2.24)
= N 2 z 2 = N 1+MN,
Čo zodpovedá definícii z dvomi nezávislými meraniami a efekt použitia dodatočných informácií je maximálny. Takže pri M N, 2 a chyba merania klesá  1,4 krát.
1,4 krát.
2. Vo všeobecnom prípade D xm 0, pričom D(M) > D M a pozitívny efekt sa zníži. V limite: x , D xm , D(M) , 1, z N, z N a pozitívny efekt úplne degeneruje. Vo všetkých ostatných prípadoch > 1 a z< N . Отсюда следует, что при наличии коррелированной информации в массиве М положительный эффект, в той или иной мере, всегда имеет место.
3. Pozitívny efekt je väčší, čím väčšia je hodnota x = m/n, tým menšie kolísanie x (hodnota x) a menšiu hodnotu počet N = n. Pozitívny účinok sa zvyšuje práve v tých prípadoch, keď je nedostatok informácií pociťovaný najakútnejšie: pri nízkych hodnotách hustoty toku žiarenia a/alebo pri meraní.
Podobný efekt sa prejaví aj pri vytváraní hodnôt M v susedstve aktuálne body spracovanie dát určením ich priemernej hodnoty (nízkofrekvenčné vyhladenie poľa n). Predbežné nízkofrekvenčné vyhladenie možno použiť aj pre štatisticky nezávislé prídavné pole m, ktoré zvýši spoľahlivosť prediktívnych odčítaní a zvýši hĺbku regularizácie, ak toto vyhladenie počas regularizácie podľa vzorcov (11.2.20 a 21) neovplyvní zmena tvaru hlavného signálu. Ten je určený pomerom frekvenčného spektra hlavného signálu a vyhladzovacieho operátora.
Existujú dva spôsoby implementácie rovnice (11.2.20): priamo v procese meraní metódou štatistického zoskupovania užitočných informácií (SGPI) v reálnom čase, alebo metódou štatistickej regularizácie údajov (SRS), registrovaných vo forme časovej (priestorovej) distribúcie v paralelných poliach vzoriek.
^ 11.3. Štatistická regularizácia údajov.
Ako vyplýva z výrazu (11.2.21), pre praktické využitie informácií z doplnkových dátových tokov je potrebné nastaviť hodnoty a rozptyl D(M) a na základe nastavenia podľa výrazu (11.2. 11), hodnota x - relatívna efektívna fluktuácia x.
Vzhľadom na SynRM nie je určenie hodnôt a x z registrovaných dátových polí náročné ako v celom priestore meraní, tak aj vo forme rozdelenia v posuvnom okne spriemerovania dát. Ten je ekvivalentný redukcii D xm => 0 pre aktuálny bod spracovania údajov podľa informácií z jeho bezprostredného okolia a umožňuje maximálnu extrakciu užitočných informácií z dodatočných tokov signálov, ak frekvenčné spektrum rozloženia x počas merania priestor je oveľa menší ako frekvenčné spektrum užitočného signálu. Všimnite si, že informácie o rozdelení x môžu mať tiež praktickú hodnotu(najmä pri gama vzorkovaní s dodatočným tokom signálu v nízkoenergetickom rozsahu spektra žiarenia - na odhad efektívneho atómového počtu hornín).
Kontrola teoretických ustanovení metódy DRS sa uskutočnilo štatistickým modelovaním zodpovedajúcich dátových polí a ich spracovaním digitálnymi filtrami.
Tabuľka 1 ukazuje 4 skupiny výsledkov spracovania podľa vzorcov (11.2.20-21) dvoch štatisticky nezávislých a konštantných hodnôt dátových polí n a m (modely konštantného poľa) s rôzne inštalácie ARS na posuvnom okne K z účtu aktuálnych hodnôt  = m i / n i a D i (M) v poli m. Aktuálny bod spracovania údajov je v strede okna. Počet vzoriek v každom poli je 1000, rozdelenie hodnôt vzoriek zodpovedá Poissonovmu zákonu. Stanovenie prediktívnych vzoriek M i pomocou poľa m na použitie v rovnici (11.2.20) sa uskutočnilo s vyhladením odčítaní v posuvnom okne Ks nízkofrekvenčného digitálneho filtra (možnosť bez vyhladenia pri Ks = 1). Laplaceovo-Gaussovo váhové okno sa používa ako dolnopriepustný filter v algoritme SynRM (ďalej). Teoretická hodnota D z.t. výsledky disperzie z bola určená výrazom (11.2.22) s výpočtom disperzie D(M) podľa výrazu D(M) =
= m i / n i a D i (M) v poli m. Aktuálny bod spracovania údajov je v strede okna. Počet vzoriek v každom poli je 1000, rozdelenie hodnôt vzoriek zodpovedá Poissonovmu zákonu. Stanovenie prediktívnych vzoriek M i pomocou poľa m na použitie v rovnici (11.2.20) sa uskutočnilo s vyhladením odčítaní v posuvnom okne Ks nízkofrekvenčného digitálneho filtra (možnosť bez vyhladenia pri Ks = 1). Laplaceovo-Gaussovo váhové okno sa používa ako dolnopriepustný filter v algoritme SynRM (ďalej). Teoretická hodnota D z.t. výsledky disperzie z bola určená výrazom (11.2.22) s výpočtom disperzie D(M) podľa výrazu D(M) =  . Pri vyhladzovaní predpovedných hodnôt bola hodnota DM vo výraze (11.2.22) braná ako DM . = H s , kde H s je zisk filtra na vyhladzovanie disperzie šumu (súčet druhých mocnín koeficientov digitálneho filtra). Dodatočne sú v tabuľke uvedené zaznamenané priemerné hodnoty koeficientu redukcie štatistických fluktuácií = n 2 / z 2 .
. Pri vyhladzovaní predpovedných hodnôt bola hodnota DM vo výraze (11.2.22) braná ako DM . = H s , kde H s je zisk filtra na vyhladzovanie disperzie šumu (súčet druhých mocnín koeficientov digitálneho filtra). Dodatočne sú v tabuľke uvedené zaznamenané priemerné hodnoty koeficientu redukcie štatistických fluktuácií = n 2 / z 2 .
Tabuľka 1. Štatistika výsledkov simulácie SynRM.
(Hlavné pole  = 9,9, Dn = 9,7, ďalšie pole
= 9,9, Dn = 9,7, ďalšie pole  = 9,9, Dm = 9,9, 1000 impulzov.)
= 9,9, Dm = 9,9, 1000 impulzov.)
| K c | Ks | z | Dz | Dz.t. | | K c | Ks | z | Dz | Dz.t. | |
| 3 | 1 | 9,7 | 5,7 | 6,19 | 1,7 | 11 | 3 | 9,6 | 3,6 | 3,80 | 2,8 |
| 5 | 1 | 9,7 | 5,4 | 5,78 | 1,8 | 11 | 5 | 9,6 | 3,3 | 3,55 | 3,0 |
| 11 | 1 | 9,6 | 5,1 | 5,36 | 1,9 | 11 | 11 | 9,6 | 3,1 | 3,22 | 3,2 |
| 21 | 1 | 9,6 | 5,0 | 5,18 | 2,0 | 11 | 21 | 9,6 | 3,0 | 3,11 | 3,3 |
| 51 | 1 | 9,6 | 5,0 | 5,05 | 2,0 | 11 | 51 | 9,6 | 3,0 | 2,99 | 3,3 |
| 3 | 3 | 9,7 | 4,1 | 4,71 | 2,4 | 3 | 11 | 9,8 | 4,5 | 4,26 | 2,2 |
| 5 | 5 | 9,7 | 3,6 | 4,01 | 2,8 | 5 | 11 | 9,7 | 3,5 | 3,78 | 2,8 |
| 11 | 11 | 9,6 | 3,1 | 3,22 | 3,2 | 11 | 11 | 9,6 | 3,1 | 3,22 | 3,2 |
| 21 | 21 | 9,6 | 2,9 | 2,91 | 3,4 | 21 | 11 | 9,6 | 3,1 | 3,12 | 3,2 |
| 51 | 51 | 9,6 | 2,7 | 2,66 | 3,7 | 51 | 11 | 9,6 | 3,1 | 2,99 | 3,2 |
Ako vidno z údajov v tabuľke, praktické výsledky filtrovania celkom dobre súhlasia s tými, ktoré sa očakávajú z údajov teoretických výpočtov. Určitý pokles priemernej hodnoty z vzhľadom na počiatočnú priemernú hodnotu n je určený asymetriou Poissonovho typu modelu. Pri malých priemerných hodnotách modelových hodnôt v poli m to vedie k určitej štatistickej asymetrii v prevádzke SynRM, pretože pri (+ m) 2 > (- m) 2 je priemerná spoľahlivosť dodatočných informácií pri vzorkách M i + menšia ako pri vzorkách M i -. Rovnaký faktor zrejme spôsobuje aj väčší nesúlad medzi teoretickými a skutočnými hodnotami Dz pri malých hodnotách Ks okna. Možno tiež poznamenať, že podľa hodnoty koeficientu filtrácia dosahuje teoretické hodnoty ( 1+MN) len vtedy, ak sú hodnoty a D i (M) určené dostatočne presne, čo vyžaduje zvýšenie okna K z výpočtu týchto parametrov pre plné využitie dodatočných informácií.
Tabuľka 2

Účinok použitia dodatočných informácií v úplnom súlade s výrazom (11.2.22) je posilnený predbežným vyhladením štatistických odchýlok v odčítaní M i a zvýšením hodnôt odčítaní doplnkového poľa (materiály v druhom prípade nie sú uvedené, pretože nemajú žiadne dodatočné informácie). V dynamicky tichých poliach možno dosiahnuť ešte väčšiu hĺbku regularizácie počítaním hodnôt a D m pomocou vyhladeného poľa M, čo umožňuje zvýšiť váhu prediktívnych údajov M i. Výsledky simulácie túto možnosť za rovnakých podmienok ako v tabuľke 1 sú uvedené v tabuľke 2. Rovnaký účinok možno v zásade dosiahnuť priamym zavedením dodatočného váhového faktora do vyjadrenia (11.2.20) ako faktora pre hodnotu D(M), čo umožňuje realizovať externý manažment hĺbka regularizácie.
Odhad zachovania rozlíšenia boli vykonané užitočné informácie o filtrovaní deterministických signálov n a m limitného tvaru - vo forme pravouhlých impulzov. Hodnotili sa dva faktory: zachovanie tvaru užitočného signálu a potlačenie štatistického šumu superponovaného na užitočný signál.
Pri nastavovaní DRS bez spriemerovania údajov cez pole M (Ks = 1, predpoveď M i na základe aktuálnych hodnôt poľa M) pre ľubovoľné hodnoty okna Kc, výstupné pole Z zopakuje pole N bez akýchkoľvek zmien, t.j. nemení užitočný signál a úplne ho zachováva frekvenčné charakteristiky. Prirodzene za predpokladu, že pole M je úmerné poľu N.
Pre K s > 1 sa tvar výstupných kriviek trochu mení a je znázornený na obr. 11.3.1. Indexy výstupných kriviek z obsahujú informácie o nastaveniach okien SynRM: prvá číslica je okno pre výpočet rozptylu D M a aktuálna hodnota (v počte bodov odčítania), druhá číslica (prostredníctvom flash) je okno na vyhladenie nameraných hodnôt M pomocou Laplace-Gaussovej váhovej funkcie a určenie prediktívnych hodnôt M i. Pre porovnanie s výsledkami typického dolnopriepustného filtrovania je na obrázku znázornená krivka n25 vzoriek N, vyhladených Laplace-Gaussovou váhovou funkciou s oknom 25 bodov.

Ryža. 11.3.1. Obdĺžnikový pulzný SynRM. Počítanie D m cez nevyhladené pole M.
Na obr. 11.3.1a ukazuje výsledok SynRM pravouhlého impulzu s hodnotou amplitúdy 10 na pozadí 5 pri pomere m/n = 1 (rovnaké hodnoty N a M). Odchýlka DN vo výraze (11.2.21) sa rovnala hodnote vzoriek N (Poissonova štatistika). Ako je možné vidieť na obrázku, pri zachovaní čela funkcie signálu, vyhladenie predpovedaných hodnôt M i vedie k vzniku skreslenia tvaru signálu na oboch stranách skoku, ktorého interval je čím väčšia, tým väčšia hodnota K s. Hodnota amplitúdy skreslení, ako vyplýva z výrazu (11.2.21), závisí predovšetkým od pomeru aktuálnych hodnôt D N a D(M) a v menšej miere od hĺbky vyhladenia predpovede. čítania.
Maximálne skreslenie pre skokové body možno odhadnúť v prvej aproximácii z nasledujúcich úvah. Hodnoty D(M) medzi bodmi skoku sa rovnajú D(M) = A 2 /4, kde A je amplitúda skoku, zatiaľ čo hodnoty koeficientu pre dolný a horný bod skoku sú určené výrazmi A 2 /(4D N + A 2) , kde D N = N skokových bodov (pre Poissonovu štatistiku). Preto s predpovedanou hodnotou M N + A / 2 pre dolný bod skoku a M N-A / 2 pre horný bod relatívna hodnota zmeny N je určené výrazom 1/(2N/A+A), t.j. bude čím menšie, tým väčšie sú hodnoty A a N a tým väčší pomer N / A, čo je jasne vidieť na obr. 11.3.1c. Z tohto výrazu tiež vyplýva, že maximálne skokové skreslenia zavedené systémom SynRM budú vždy niekoľkonásobne menšie ako štatistické výkyvy priamych odpočtov = 1/  na okrajoch skokov.
na okrajoch skokov.
So zvýšením hĺbky regularizácie zavedením výpočtu disperzie D (M) cez vyhladené pole M sa vzor skreslenia trochu zmení a je znázornený na obr. 11.3.2. Odozva SynRM na vyhladenie disperzie D(M) sa prejavuje akousi kompenzáciou absolútnych odchýlok odčítaní priamo po stranách skoku odchýlkami opačného znamienka vo viac vzdialené pole zo skoku. Maximálne hodnoty skreslenia zostávajú približne na rovnakej úrovni ako pri práci na nevyhladenom rozptyle D(M), s o niečo menšou závislosťou od nárastu hodnôt N a A.

Ryža. 11.3.2. Obdĺžnikový pulzný SynRM. Počítanie D m cez vyhladené pole M.
V uvedených príkladoch bola braná hodnota počítacieho okna K s rovná hodnote vyhladzovacie okno K s prídavného poľa M. Keď K c > K s, obraz procesu sa prakticky nemení. Pri inverznom pomere veľkostí okien vstupuje do hry druhý faktor - odchýlka od skutočných hodnôt účtu aktuálnych hodnôt x i = m/n v malom okne K s vyhladeným poľom hodnôt. veľké okno K s . Pri vzdialenostiach od skoku funkcie väčších ako K s /2 sa DRS prepne do režimu preferencie pre vyhladené hodnoty poľa M, pretože D(M) 0, ktorá pri K s< K s может приводить к появлению существенной погрешности – выбросов на расстояниях К с /2 от скачков. Естественно, что при практических измерениях таких условий наблюдаться не будет и эффект резко уменьшится, но для полного его исключения вариант K c K s можно считать предпочтительным.


Ryža. 11.3.3. DRS signál N poľom M. Obr. 11.3.4. Koeficient .
(Účtovanie D m nad nevyhladeným poľom M). (Štatistický priemer za 50 cyklov)
Na obr. 11.3.3 je znázornený príklad záznamu signálu randomizovaného modelu vo forme pravouhlého impulzu s amplitúdou 40 na pozadí 10, ktorý znázorňuje princíp činnosti SynRM. Ako sa očakávalo, DRS vyhladzuje štatistické fluktuácie pozadia a signálu mimo zóny K od skoku, pričom uprednostňuje vyhladené prediktívne hodnoty Mi a nemení hodnoty pozadia a signálu v rámci tejto zóny. v dôsledku prudkého nárastu aktuálnych hodnôt D(M) vo výraze (11.3.21). Zmena koeficientu v zóne skoku, ktorá riadi tvorbu výstupných hodnôt, je znázornená na obr. 11.3.4 (priemer za 50 randomizačných cyklov pre modelový impulz na obr. 11.3.3) a názorne ukazuje princíp prispôsobenia SynRM dynamike zmien hodnôt spracovávaných signálov.
Štatistické vyhodnotenie regulácie údajov na obdĺžnikové impulzy sa uskutočnilo počas 50 cyklov randomizácie počiatočných polí N a M. Ako príklad sú na obrázkoch 11.3.5 a 6 uvedené výsledky spracovania štatistík polí N a Z. Okrem štatistík randomizačných cyklov je uvedený súhrn spracovanie všetkých cyklov pre všeobecné štatistiky pozadie a vrcholy pulzov. Výsledky spracovania pre rovnaké nastavenia filtra sú uvedené v tabuľke 3.


Ryža. 11.3.5. Štatistika signálu N Obr. 11.3.6. Z Štatistika signálu
(Merania nad 50 cyklov). (50 cyklov. Počítajte D m nad nevyhladeným M)
Tabuľka 3
Štatistika hodnôt pozadia a vrcholov (50 cyklov).
Výsledky simulácie
potvrdiť nadradenosť SRS nad jednoduché metódy vyhladenie. V numerickej forme sa to jasne prejavuje znížením rozptylu vzoriek výstupného poľa Z, pričom priemerné hodnoty poľa N sú prakticky zachované pre vzorky pozadia aj pre hodnoty amplitúdy signál. Pri jednoduchom vyhladzovaní spôsobí „rozpad“ čiel signálu (potlačenie vysokofrekvenčných zložiek spektra signálu), ako by to malo byť pri použití nízkofrekvenčných filtrov, pokles oproti pôvodnému poli priemerných hodnôt pri maximách a zvýšení hodnôt signálu pozadia, ktoré je väčšie, tým väčšie je okno váhových funkcií. Tento efekt sa prejavuje najmä v intervale filtračného okna na oboch stranách prudkých zmien signálu.
Pri absencii ďalších polí M, korelovaných s regularizovaným poľom N, je možné vytvoriť prediktívne hodnoty Mi v najbližších susedstvách aktuálnych hodnôt Ni v posuvnom okne Ks. Pri striktne správnom prístupe by aktuálny bod N i nemal byť zahrnutý do výpočtu predpovedaných hodnôt M i, ale ako ukázala simulácia, prakticky to neovplyvňuje výsledky regularizácie. Pri predpovedaní Mi pre všetky body okna Ks sa pole M vytvorí akoukoľvek metódou vyhladzovania z poľa N a všetky vlastnosti činnosti DRS na vyhladených poliach M, o ktorých sa hovorí vyššie, zostanú nezmenené za predpokladu, že že hodnoty D m sa počítajú v okne K s poľom M. Na vylúčenie odľahlých hodnôt na oboch stranách skokov užitočného signálu musí byť výpočet D m ako rozptylu predpovedaných hodnôt M i vykonať priamo na poli N.
Základnou vlastnosťou SynRM je možnosť postupného viacnásobného filtrovania údajov, pri ktorom je možné prevažujúce zvýšenie stupňa regularizácie údajov uskutočniť s minimálnym skreslením tvaru užitočného signálu. Na vykonanie posledného je veľkosť okna K s počtom x i a D m nastavená na minimum (3-5 bodov) a hĺbka regularizácie údajov (stupeň potlačenia šumu) je nastavená číslom po sebe idúce operácie filtrácia (až 3-5 priechodov). Príklad regularizácie modelového poľa N v troch priechodoch je znázornený na obr. 11.3.7.

Ryža. 11.3.7. DRS jedného poľa N (3 prechody. Počítanie D m cez pole n)
Pre porovnanie, bodkovaná čiara na obrázku znázorňuje vyhladenie poľa 5-bodovým Laplace-Gaussovým filtrom, ktorý má koeficient potlačenia šumu ekvivalentný 3-priechodovému SynRM (pozri obr. 11.3.9).
Na obrázkoch 11.3.8 a 11.3.9 sú výsledky štatistického spracovania 3-priechodového SynRM pre 25 simulačných cyklov v porovnaní s 1. priechodom a s 5-bodovým Laplace-Gaussovým filtrom (krivka n5).


Ryža. 11.3.8. Štatistika stredných hodnôt Obr. 11.3.9. Štatistika rozptylu
(25 cyklov. Počítanie D m v poli n) (25 cyklov. Počítanie D m v poli n)
Počet prechodov môže byť automaticky obmedzený napríklad efektívnou hodnotou korekčných údajov z i = N i - z i v každom prechode v porovnaní s predchádzajúcim prechodom, ktorá sa najprv prudko zníži v dôsledku vyhladzovania výkyvov a potom v závislosti od dynamika funkcie signálu sa stabilizuje alebo dokonca začne narastať v dôsledku skreslenia samotného signálu.
frekvenčné znázornenie činnosť SynRM je jasne vidieť na obr. 11.3.10, ktorý ukazuje moduly spektier randomizovaného signálu vo forme meandru (priemerné hodnoty minimálne - 20, maximálne - 100, 25 periód po 40 vzoriek, spolu 1000 vzoriek) a výsledky jeho spracovania pomocou SynRM (okno K c = 3, okno Ks = 3).


Ryža. 11.3.10. Moduly spektier modelových signálov. Obr.11.3.11. Časť spektra.
(1 – vstupné pole N, 2 – výstupné pole Z , jeden cyklus CRD,
3- výstupné pole Z , tri cykly DRS), 4 je pole nerandomizovaných meandrov).
Modul spektra hlavného užitočného signálu (v tento prípadčistý meander) je sled jednotlivých harmonických frekvencií v celom rozsahu spektra. V spektre náhodných štvorcových vĺn sú tieto harmonické frekvencie sčítané so spektrom šumu, ktoré je štatisticky rovnomerne rozložené v celom rozsah frekvencie(šumové spektrum na obrázku je kvôli prehľadnosti vyhladené). SynRM potláča šumové zložky signálu prakticky bez ovplyvnenia harmonických frekvencií meandru a bez ich zmeny amplitúdy. Posledne menované je možné vidieť na obr. 11.3.11, ktorý zobrazuje výsek spektra signálu vo vysokofrekvenčnej časti hlavného rozsahu v oblasti jednej harmonickej meandru (frekvenčné zložky šumu nie sú vyhladené). S 3-cyklovým SynRM sú vysokofrekvenčné zložky šumu potlačené takmer o jeden rád.
Príklad praktického využitia SynRM je znázornený na obr. 11.3.12 pri testovaní časti studne, ktorá pretína útvary kamenná soľ, o obsahu sylvinitu gama žiarením draslíka-40. Podľa geologického testovania majú sylvinitové vrstvy v hrúbke hostiteľských hornín (halitu) dostatok ostré hranice a homogénne z hľadiska obsahu sylvinitu vo vrstvách. Pôvodný diagram HA (detektor CsJ(Tl) s oloveným filtrom s hrúbkou 2 mm) a výsledky filtrovania pôvodného poľa údajov HA pomocou SynRM a dolnopriepustného filtra s Laplace-Gaussovým váhovým oknom sú na obr. . 11.3.12.

Ryža. 11.3.12. GC grafy.
Výsledky interpretácie PC diagramov symetrickým dekonvolučným digitálnym filtrom (okno 13 bodov) sú znázornené na obr. 11.3.13. Ako je možné vidieť na obrázku, dekonvolúcia nad nevyhladeným log HA dáva významné variácie v obsahu sylvinitu v nádržiach. Použitie nízkofrekvenčného filtrovania diagramu HA odstraňuje kolísanie sklonu v nádržiach, ale výrazne vyhladzuje hranice nádrží. Použitie RMS umožňuje odstrániť tento nedostatok.

Ryža. 11.3.13. Výsledky interpretácie GC grafov.
Na záver poznamenávame, že SynRM možno použiť na regularizáciu nielen údajov z jadrovej fyziky, ale aj akýchkoľvek iných numerických polí kontinuálnych meraní, ak je ich korelačný polomer aspoň 3–5 počtov. Ako príklad na obr. Obrázok 11.3.14 ukazuje záznam akustického záznamu zaznamenaný s krokom vzorkovania údajov 20 cm, ktorý bol vyhladený pomocou SynRM bez straty priestorového rozlíšenia.

Ryža. 11.3.14. Akustický logovací diagram a výsledok jeho spracovania systémom SynRM
(5 cyklov, Kc = Ks = 3, fyzické okno 0,6 m).
Kurz 17-07. Modernizácia adaptívneho filtra na vyhladenie dát štatisticky rozdelených podľa Poissonovho zákona.
^ 11.3. Štatistické zoskupovanie užitočných informácií.
Pokiaľ ide o hardvérové metódy implementácie SGPI, môže sa vykonávať v reálnom čase, ak sú informácie reprezentované prúdom impulzov a hlavným informatívnym parametrom je frekvencia impulzov.
Podstata hardvérovej implementácie spočíva v štatistickom (skoro štatistickom) normalizovanom vzorkovaní impulzov z doplnkového prúdu m a ich sčítaní s hlavným prúdom n s nastavením podmienok vzorkovania vo vzťahu k frekvencii opakovania impulzov v prúdoch. Za predpokladu, že pre režim spojitého merania M + 1 = M prepíšeme výraz (5.2.20) dosadením hodnoty do tohto tvaru:
Z = N+ (M/-N) M/(M+D(M)). (11.3.1)
Vynásobte ľavú a pravú časť výrazu normalizačným multiplikačným faktorom výstupného prúdu K = l+R:
Z = Kz=N+RN+(M/-N)KM/(M+D(M). (11.3.2)
Nahraďte vzorky RN vzorkou signálov z prúdu m:
RN = P v M, (11.3.3)
Kde P in - pravdepodobnosť vzorkovania signálov z prúdu m. Ak sa pravdepodobnosť vzorkovania signálov udržiava rovná hodnote
Pin = R /, (11.3.4)
Potom bude
M/-N = P v M/R-N 0, (11.3.5)
A teda pre výraz (11.3.2) máme:
(M/-N) KM/(M+D(M) 0, (11.3.6)
Z = N+P v M N+RN. (11.3.7)
Pri štatistickej nezávislosti hodnoty x od frekvencie prietokov n a m platia vyššie uvedené výrazy pri určovaní hodnoty ako v celom priestore merania, tak aj pre posuvné okná aktuálnych hodnôt v určitých intervaloch predchádzajúcich meraní. Platí aj opačný záver: ak v určitom intervale merania výraz (11.3.5) zmizne, potom stanovená pravdepodobnosť vzorkovania zodpovedá podmienke (11.3.4). Na základe tohto princípu je možné realizovať hardvérovú implementáciu SGPI s automatickým prispôsobením podmienkam merania: riadenie procesu vzorkovania impulzov z toku m a ich usmerňovanie, aby boli sčítané s tokom n podľa spätnoväzbových signálov zo zariadenia. ktorý sleduje výraz (11.3. 5).
Vlastnosti hardvérovej implementácie SGPI s automatickým prispôsobením podmienkam merania sú nasledovné.
Hodnota pravdepodobnosti vzorkovania P in nemôže byť väčšia ako 1. Z (11.3.3) teda vyplýva, že pre všetky meracie intervaly musí byť splnená podmienka M ≥ RN, a teda podmienka ≥ R musí byť splnená po celú dobu. meracieho priestoru, ktorý určuje výber koeficientu R Hodnota koeficientu R zásadne obmedzuje mieru pozitívneho vplyvu SGPI (k max 1+R), na rozdiel od SynRM, kde takéto obmedzenie nie je.
Relatívna štatistická chyba meraní výstupného prúdu vzoriek Z zodpovedá výrazu (11.2.23) za podmienky konštantnej hodnoty Pv, t.j. pri nastavení hodnoty P v priemernej hodnote veličiny ako celku v priestore meraní. Pri automatickom prispôsobovaní sa podmienkam merania je hodnota pravdepodobnosti P v aktuálnej priemernej hodnote pomeru n / m určitého predchádzajúceho intervalu merania tiež štatisticky kolísajúca hodnota s rozptylom rozdelenia (bez zohľadnenia zmien skutočná hodnota X):
Dp = R2 (n+m)n/(m3T), (11.3.8)
Kde T je interval pre priemerovanie informácií pri určovaní aktuálnej hodnoty. V súlade s tým, rozptyl a stredná kvadratická chyba aktuálnych hodnôt Z:
Dz \u003d D N + P v D M + M 2 D p \u003d N + P v M + M 2 D p, (11.3.9)
z 2 \u003d (N + P v M + M 2 D p) / (N + P v M) 2. (11.3.10)
Pri konštantnej expozícii merania sa pozitívny efekt zvyšuje so zvýšením hodnoty T:
K \u003d K2/ (K + R2 (n + m) / mT). (11.3.11)
K max 1 + R, z 2 1 / (N + P v M) pri T . (11.3.12)
Vo všeobecnom prípade, berúc do úvahy strednú štvorcovú chybu predikcie xi hodnôt x i pre aktuálne body merania na hodnotách v predchádzajúcich intervaloch pri Т > :
Dz \u003d N + P v M + M 2 (D p + P v 2 xi 2). (11.3.13)
Tvorba hodnoty P na základe informácií o priemerných hodnotách meracích intervalov predchádzajúcich aktuálnym definuje SGPI ako dynamický systém s vhodnou časovou konštantou odozvy na zmeny podmienok merania. Vzhľadom na to, že po prvé pre akýkoľvek bod v meracom priestore musí byť splnená podmienka m > nR a po druhé, zväčšenie intervalu T vedie k zvýšeniu doby odozvy na zmeny podmienok merania, je vhodné obmedziť hodnotu T na hodnotu rádovo (5-10) aktuálnych expozičných hodnôt. Čím menšie je rozloženie priestorovej frekvencie x vo vzťahu k rozdeleniu n, tým väčšia je hodnota T prijateľná.
Implementácia systémov SGPI je značne uľahčené čisto praktickým obmedzením cieľovej úlohy: dosiahnutie maximálneho pozitívneho efektu v extrémne nepriaznivých podmienkach merania (s nízke hodnoty registrovaná hustota toku žiarenia, at vysoká rýchlosť merania) s degeneráciou pozitívneho efektu, keďže štatistická chyba meraní v hlavnom prúde klesá. Ak sa teda napríklad pri downhole gama testovaní štatistická chyba merania hlavného toku signálu v oblastiach so zvýšenou intenzitou žiarenia zníži na 2-3 %, tak jej ďalšie znižovanie nemá praktický zmysel, pretože základná chyba zaznamenávania rádiometrických zariadení zvyčajne nepresahuje 5 %.
Použitie tohto cieľového obmedzenia umožňuje aplikovať tvorbu parametra P nie v posuvnom okne časového alebo priestorového spriemerovania informácií, ale podľa určitého registrovaného objemu predchádzajúcich informácií, t.j. s automatickou variáciou intervalu spriemerovania informácií a neustála regulácia Pin v závislosti od frekvencie tokov signálov, pričom množstvo informácií pre tvorbu Pin je možné nastaviť s prihliadnutím na povahu zmien veľkosti a prípustnú hodnotu dynamickej chyby merania.
Na implementáciu tejto možnosti transformujeme výraz (11.3.5) cez interval spriemerovania t do tvaru:
P v mt/R-nt+Q = q, (11.3.14)
P v \u003d nR / m \u003d q / , (11.3.15)
Q Q pri t ,
Kde Q- priemerná úroveň posunutie numerického ekvivalentu spätnoväzbového signálu systému ACD - automatické riadenie pravdepodobnosti vzorkovania P in, čím sa zabezpečí splnenie rovnosti (11.3.15), - koeficient úmernosti transformácie. digitálny signál ARV v signáli P in. Diferenciálna rovnica pre systém ACD:
Dq/dt = n-mq/R. (11.3.16)
Riešenie Diferenciálnej rovnice za počiatočných podmienok t = 0 a q = O (prechodná funkcia ACD):
Q = R(n/m) . (11.3.17)
P v \u003d R (n / m) \u003d R (n / m) . (11.3.18)
Ako je zrejmé z týchto výrazov, hodnota spätnoväzbového signálu ACD je úmerná pomeru (n/m) prietokových frekvencií a časová konštanta ACD R/m je priamo úmerná hodnote prevodného koeficientu s nepriamou úmernosťou k hodnote frekvencie prídavného prietoku m, rovná ako aj pri zohľadnení (11.3.15) je priamo úmerná aktuálnej hodnote spätnoväzbového signálu q s nepriamou úmernosťou k hodnote frekvencia hlavného toku n. Prvý je úplne ekvivalentný druhému pri (n/m) const a q = Rn/m Q. V prvej aproximácii pomocou výrazu (11.3.8) a ekvivalencie hodnoty štatistických fluktuácií pri Т ≈2 pre posuvné pravouhlé časové okná a okná merača rýchlosti s exponenciálnou prechodovou funkciou, pre relatívne kolísanie hodnoty P v dostaneme:
р 2 = (n+m)/(2Rn)= (n+m)/(2qm). (11.3.19)
Výraz platí pre priame meranie pomeru (n/m) 2-sadzbovým meračom a je maximálnym odhadom. Pre presnejšie posúdenie je potrebné vziať do úvahy, že v tomto prípade je tachometer zariadenie s negatívom spätná väzba pozdĺž reťazca ARV, čo trochu znižuje hodnotu fluktuácie. Presný odhad možno urobiť pomocou Campbellovho vzorca pre rozptyl náhodnej premennej x(t) vytvorenej sčítaním hybnosti Poissonovho toku , oddelene pre tok n pri m = konštanta a prietok m pri n = konštanta, nasledovaný súčet druhých mocnín relatívnej efektívnej hodnoty fluktuácie. Takže pre nižšie uvedený obvod bola získaná hodnota р 2 ≈ (R+1)m/(2nR 2).
Pri hodnote koeficientu R ≤ (m/n) min zvolenom pre priestor merania pomocou výrazu (11.3.19) sa parametre systému ACD (koeficient a priemerná hodnota Q pre priestorový priemer) hodnotu pomeru n/m) možno nastaviť na danú hodnotu prípustné kolísanie pravdepodobnosti vzorkovacích impulzov P v:
≤ (l+(m/n) max)/(2R p 2). (11.3.20)
V procese meraní AEC vykonáva kontinuálne prispôsobovanie aktuálnym podmienkam merania (nq, m mR, P v q/) s reguláciou aktuálnej hodnoty P v podľa množstva. informácií q = (n/m) R = n predchádzajúceho meracieho intervalu zodpovedajúcou zmenou časovej konštanty integrácie tejto informácie v závislosti od zmeny frekvencií tokov signálov. Keď n/m const, druhý má absolútny charakter: р const, (l/n + l/m)/(2 p 2).
Treba si uvedomiť, že v mnohých metódach geofyziky sú celkom priaznivé podmienky na využitie SGPI aj SynRM. Takže napríklad vo vzťahu k downhole gama vzorkovaniu s extrakciou dodatočných informácií z nízkoenergetickej časti spektra žiarenia sú podmienky pre celkom presnú reakciu na zmeny parametrov pozdĺž vrtu veľmi dobré, pretože hlavný faktor variácie hodnôt x - efektívne atómové číslo média, kolíše v malom rozsahu s nízkou priestorovou frekvenciou variácií a v zónach aktívnych hornín, kde je najviac vysoká presnosť je možná interpretácia výsledkov meraní a výrazné zmeny v atómovom čísle hornín, v dôsledku zvýšenia hustoty toku žiarenia sa časová konštanta AEC výrazne zníži a priestorové rozlíšenie meraní sa zodpovedajúcim spôsobom zvýši. Podobné podmienky sú spravidla typické aj pre iné metódy jadrovej geofyziky.
Príklad vykonania systému SGPI pre dva impulzné toky signálu je znázornené na obr. 11.3.1. Funkčná schéma SGPI obsahuje reverzibilné počítadlo impulzov 1, na ktorého sčítací vstup sa privádzajú impulzy hlavného prúdu n a na odčítací vstup - impulzy dodatočného prúdu m, ktoré predtým prechádzajú obvodom vzorkovania impulzov 3. a protirozdeľovač 4 frekvencie opakovania impulzov s prepočítaním koeficientu R.

Ryža. 11.3.1. Základné funkčný diagram SGPI.
1 - reverzibilné počítadlo impulzov, 2 - jednotka generovania signálu vzorkovania impulzov, 3 - obvod vzorkovania impulzov, 4 - delič protifrekvencie po R, 5 - sčítacia jednotka impulzného prietoku. Impulzy hlavného toku n a vzorkové impulzy z toku m, ktorých frekvencia sa rovná P v m = R·n, sa privádzajú na vstup súčtu signálových tokov bloku 5. Intenzita toku impulzov na výstupe bloku 5 sa rovná z = n+R v m = (1+R)n. Blok 5 môže obsahovať prepočítavací obvod s koeficientom K = (1 + R), pričom výstupný tok bude redukovaný na mierku hlavného toku n a bude možné synchrónne prepínať prevodné koeficienty obvodov 4 a 5 pre rôznych podmienok merania, pričom nastavenie optimálnej hodnoty koeficientu R je možné prepnúť do automatického režimu s kontrolou aktuálnej hodnoty (v určitom intervale) informačného kódu obvodu 1. Alternatívnym riešením je napájanie sčítacieho vstupu obvodu. 5 s impulzným prúdom z výstupu okruhu 4, pričom frekvencia prietoku z bude vždy 2-násobok prietoku n. Na okraj si všimneme, že pri výstupe informácie q = R(n/m) v digitálnom kóde z čítača 1 môže tento obvod vykonávať funkcie univerzálneho digitálneho intenzimetra: priemerná frekvencia impulzov (n-var, m-konšt. z generátora hodinovej frekvencie), priemerný časový interval medzi impulzmi (m-var, n-konst) a frekvenčný pomer n/m dvoch štatisticky rozdelených tokov impulzov. literatúre 38. Adaptívne filtre. / Ed. C.F.N. Cowan a P.M. Grant. – M.: Mir, 1988, 392 s. 43. Ayficher E., Jervis B. Digitálne spracovanie signálu. Praktický prístup. / M., "Williams", 2004, 992 s. (nx)2 (∑r i) i=1 = (nx)2= n2x2= nPx. nD r nP r P r Za podmienok uvedených vyššie sa teda v dôsledku n-násobného počtu pomer výkonov signálu a šumu zvýši n-krát. Časový interval medzi jednotlivými odčítaniami by mal byť dlhší Interferenčný korelačný interval τ r 0 . V opačnom prípade získajte z akumulácia bude menšia ako hodnota daná výrazom (5.21). Zvýšením počtu čítaní m, t.j. prenosový čas Tx, môžete ľubovoľne zvýšiť odstup signálu od šumu. Ak signál predstavuje periodickú funkciu času, potom sa odčítania musia vykonávať v intervaloch rovných alebo násobkoch periódy tejto funkcie. V takýchto prípadoch sa metóda nazýva metóda synchrónnej alebo koherentnej akumulácie. Akumulačný efekt je rovnaký ako v prípade konštantného signálu. Akumulačný efekt možno realizovať aj integráciou vstupného signálu v čase Tx. Táto metóda sa nazýva integrálna metóda. Je vhodné použiť integrálnu metódu, keď je užitočný signál konštantný (alebo kvázi konštantný). Hlavnou vlastnosťou adaptívneho systému je časovo premenná samoregulačná prevádzka. Nevyhnutnosť takéhoto fungovania je zrejmá z nasledujúcej úvahy. Ak vývojár navrhne „nezmeniteľný“ systém, ktorý považuje za optimálny, potom to znamená, že vývojár predvída všetky možné podmienky na jeho vstupe, aspoň v štatistickom zmysle, a očakáva, že systém bude fungovať za každej z týchto podmienok. Dizajnér potom zvolí kritérium, podľa ktorého by sa mal výkon posudzovať, ako je priemerný počet chýb medzi výstupom skutočného systému a výstupom niektorého zvoleného modelu alebo „ideálneho“ systému. Nakoniec vývojár vyberie systém, ktorý funguje najlepšie podľa stanovených výkonnostných kritérií, zvyčajne z nejakej a priori ohraničenej triedy (napríklad z triedy lineárnych systémov). V mnohých prípadoch však nemusí byť presne známy celý rozsah vstupných podmienok, dokonca ani v štatistickom zmysle, alebo sa podmienky môžu z času na čas meniť. Potom má adaptívny systém, ktorý pomocou bežného procesu vyhľadávania neustále hľadá optimum v rámci prípustnej triedy možností, výhody oproti nemennému systému. Adaptívne systémy zo svojej podstaty musia byť časovo premenlivé a nelineárne. Ich vlastnosti závisia okrem iného aj od vstupných signálov. Ak je na vstup privedený signál x 1, tak sa naň adaptívny systém naladí a vygeneruje výstupný signál – nazvime ho y1. Ak sa na vstup privedie ďalší signál x2, potom sa systém na tento signál naladí a vygeneruje výstupný signál – nazvime ho y2. Vo všeobecnosti sa štruktúra a korekčné procesy adaptívneho systému budú líšiť pre dva rôzne vstupné signály. Na získanie optimálneho riešenia existuje veľa metód na úpravu hodnôt koeficientov hmotnosti filtra. Boli použité metódy náhodných porúch, ktoré zmenili hmotnostné koeficienty filtra; ďalej sa analyzoval vstupný signál, aby sa zistilo, či sa jeho náhodná porucha blíži k požadovanému riešeniu alebo ho od neho vzďaľuje. V súčasnosti sa na výpočet váhových koeficientov adaptívnych filtrov široko používa adaptívny algoritmus najmenších štvorcov (LSM), pretože používa gradientové metódy, ktoré sú oveľa efektívnejšie ako iné pri poskytovaní konvergencie k optimálnemu riešeniu. Je možné ukázať, že gradientová metóda najmenších štvorcov je veľmi podobná metóde maximalizácie pomeru signál-šum, ktorá bola vyvinutá na použitie v prípadoch, keď je potrebné získať optimálne váhové koeficienty pre adaptívne anténne polia. Tiež sa ukázalo, že Lucky nulovací filter je zjednodušením všeobecnejšej metódy najmenších štvorcov gradientu. Adaptívny filter je teda filter, ktorého prenosová funkcia (alebo frekvenčná charakteristika) je prispôsobená, t.j. je zmenený tak, aby prenášal užitočné zložky signálu bez skreslenia a tlmil nežiaduce signály alebo rušenie. Schéma adaptívneho filtra je znázornená na obrázku 5.5. vstupný signál digitálny výstup filtra chybový výstup referenčný signál e n =y n -y n prispôsobenie Takýto filter funguje na princípe odhadu štatistických parametrov signálu a úpravy vlastnej prenosovej funkcie tak, aby sa minimalizovala nejaká objektívna funkcia. Táto funkcia sa zvyčajne vytvára pomocou „referenčného“ signálu na referenčnom vstupe. Toto referenčný signál možno považovať za požadovaný signál na výstupe filtra. Úlohou adaptačného bloku je úprava koeficientov x n , ktorý určuje chybu v operácii filtra. Najdôležitejšou funkciou, ktorú vykonáva adaptívny filter, je modelovanie systému. Toto je znázornené na obr. 5.6, kde primárny signál s rovnomernou spektrálnou hustotou je privedený priamo buď na vstup s alebo na vstup adaptívneho filtra. Primárny signál je privedený na vstup systému s impulznou odozvou H(n) , výstup systému je pripojený na druhý vstup adaptívneho filtra. Na získanie optimálnych hmotnostných vektorov Hopt adaptívny filter môžete použiť dva rôzne prístupy, ktoré povedú k rôznym výsledkom. To sa deje v nasledujúcich prípadoch: 1.
Neznámy systém H(n) je pripojený na vstup adaptívneho filtra (obr. 5.6, a). V tomto prípade je optimálna impulzná odozva adaptívneho filtra presným modelom zodpovedajúcej odozvy systému H(n) . 2.
Neznámy systém H(n) je pripojený na vstup s adaptívneho filtra (obr. 5.6, b). V tomto prípade je optimálna impulzná odozva adaptívneho filtra inverzná funkcia zodpovedajúcej odozvy neznámeho systému. Adaptívny Adaptívny Ryža. 5.6. Aplikácia adaptívneho filtra na priame modelovanie systému: Hopt =H(n) (a) a inverzné modelovanie systému: Hopt =H-1 (n) (b). Praktickým príkladom ilustrujúcim činnosť prvého typu adaptívneho filtra (tj priama simulácia systému) je potlačenie odrazeného signálu v hybridnej telefónnej linke. Príkladom, ktorý možno použiť na ilustráciu princípu adaptívneho filtra, ktorý modeluje inverznú odozvu systému, je korekcia skreslení pri prenose dát po telefónnych linkách. V tomto prípade je vstup telefónnej linky vybudený známym signálom a skreslený signál z výstupu linky je privádzaný na vstup s(n) adaptívneho filtra. Potom sa filter vyladí aplikáciou série známych (neskreslených) primárnych signálov na vstup (n). Adaptívny filter modeluje inverznú impulznú odozvu vedenia, aby na výstupe produkoval filtrované (bez skreslenia) údaje. Ďalšou oblasťou použitia adaptívnych filtrov je potlačenie šumu. V tejto schéme je primárny signál obsahujúci požadovanú informáciu spolu s rušivým signálom privedený na vstup y(n) . Potom z iného zdroja, ktorý neobsahuje žiadne zložky pôvodného signálu, prichádza nezávislý korelovaný signál - vzorka rušivého signálu. Ak je tento korelovaný signál aplikovaný priamo na vstupy s(n) adaptívneho filtra, filter generuje impulznú odozvu, ktorá poskytuje výstupný signál y(n), ktorý koherentne odčíta nežiaducu zložku od y(n), pričom zostane len požadovaná signál na výstupe e(n). Jedným z príkladov použitia tejto metódy je záznam srdcového tepu plodu. Primárny signál pochádza z prevodníka umiestneného na povrchu brucha matky. Tento prevodník generuje signál obsahujúci pulzy srdcového tepu plodu, ktoré sú však v podstate maskované srdcovým tepom matky. Potom sa z druhého meniča umiestneného na hrudi matky prijme sekundárny signál, ktorý registruje iba tlkot srdca matky. Ďalej adaptívny filter modeluje dráhu skreslenia od prevodníka umiestneného na hrudníku k prevodníku umiestnenému na bruchu, aby získal signál, ktorý je koherentne odčítaný od signálu z brucha. Adaptívne filtre sa používajú aj v iných aplikáciách, napríklad na elimináciu hluku motora v mikrofóne pilota v kokpite lietadla alebo na potlačenie okolitého akustického hluku, napríklad vo veľkých elektrárňach. Ďalšou aplikáciou adaptívnych filtrov je implementácia samoladiaceho filtra používaného na izoláciu sínusoidy maskovanej širokopásmovým šumom. Takáto aplikácia v adaptívnom lineárnom zosilňovači (ALU) sa vykonáva tak, že sa signál privádza priamo na vstup filtra y(n) a na vstup filtra s(n) sa aplikuje modifikácia signálu s časovým oneskorením. Ak je oneskorenie väčšie ako prevrátená hodnota šírky pásma filtra, zložky šumu dvoch vstupov nebudú korelovať. Adaptívny z filtra vychádza sínusoida so zvýšeným odstupom signálu od šumu, pričom sínusové zložky sa na výstupe chybového signálu zmenšujú. Adaptívne filtre typu IIR sa používajú hlavne na riešenie problémov, ako je zmiernenie vplyvu šírenia viaccestného signálu v radarových a rádiových komunikačných systémoch. V tomto prípade prijímaný signál obsahuje pôvodný vysielaný signál konvolvovaný s kanálovou impulznou odozvou, ktorá v multipath obsahuje iba nuly. Potom, aby sa eliminovalo interferenčné rušenie, adaptívny prijímač modeluje charakteristiku, ktorá je inverzná ku kanálovej charakteristike (obr. 5.6, b). To sa najefektívnejšie dosiahne použitím modelu adaptívneho filtra s odozvou iba na pól, pričom polohy pólov sa vyberú tak, aby zodpovedali nulám v odozve kanála. Pri návrhu adaptívneho FIR filtra je možné brať do úvahy aj tento model, ale je ekonomickejšie použiť rekurzívnu štruktúru, keďže implementuje inverznú štruktúru filtra pri nižšom ráde filtra a s nižšími hmotnosťami. Preto môžeme s dobrým dôvodom povedať, že takáto štruktúra poskytne rýchlejšiu konvergenciu ako jej priečny náprotivok. Na zabezpečenie stability adaptívneho rekurzívneho filtra je však potrebný vysoký stupeň presnosti pri výpočte digitálneho obvodu. Metóda adaptívneho spracovania signálu založená na filtroch typu IIR sa používa v elektronických radarových meracích prijímačoch na izoláciu impulzov. Adaptívne Kalmanove filtre sú zaujímavé na identifikáciu typov radarových oscilácií generovaných určitými typmi žiaričov. Používajú sa aj pri filtrovaní a viaccestnom zmierňovaní vo vysokofrekvenčných (3 až 30 MHz) digitálnych komunikačných kanáloch, kde je podstatná vysoká miera konvergencie týchto filtrov. Väčšina FIR filtrov je postavená s pomerne jednoduchými bežnými predpokladmi. Tieto predpoklady vedú k dobre známym jednoduchým adaptačným algoritmom (napr. LSM), ktorých implementácia je podrobná z hľadiska miery konvergencie, zvyškovej chyby atď. Tento prístup sa najčastejšie používa pri aplikácii adaptívnych filtrov v systémoch komunikácie na veľké vzdialenosti, napríklad na vyrovnanie a tlmenie odrazeného signálu. V roku 1971 Chang významne prispel k klasifikácii typov filtrov: pokúsil sa spojiť všetky prístupy a vytvoriť jednu zovšeobecnenú štruktúru ekvalizéra, alebo korekčný filter (obr. 5.7.). Táto štruktúra obsahuje sadu ľubovoľných filtrov pripojených k lineárnemu váhovému a kombinačnému obvodu. Filter typu FIR možno odvodiť z tejto zovšeobecnenej štruktúry nahradením ľubovoľného filtra napojenou oneskorovacou linkou, čím sa na výstupe získa séria časovo oneskorených vzoriek signálu. Filter typu IIR v dôsledku prítomnosti rekurzívnych ob- Ryža. 5.7. Zovšeobecnená bloková schéma korekčného filtra. Alternatívnym spôsobom implementácie filtra typu FIR je mriežková štruktúra, ktorú si možno predstaviť ako kaskádové spojenie nerozvetvených prediktívnych filtrov chýb (obrázok 5.8). Táto štruktúra, široko používaná v lineárnych prediktoroch na spracovanie reči, rozdeľuje signál na množinu dopredných (f) a spätných (b) vzoriek signálov diverzity s pridanými oneskoreniami v spätnom kanáli. Signály sú vynásobené parciálnymi korelačnými koeficientmi PARCOR (parciálna korelácia)k(n) , ktoré sa takto nazývajú kvôli ich analógii s koeficientmi odrazu diskrétnej mriežky. Koeficient priameho rozdielu PARCOR pre akúkoľvek väzbu sa zvyčajne rovná komplexnému konjugátu recipročného koeficientu; výnimkou sú procesory, ktoré spracúvajú diskrétne informácie cez hlavný kanál a v ktorých sú tieto koeficienty rovnaké. f0 (n f1 (n + f2(n k1 (n k2 (č ∑ b2 (č b0 (n b1 (n Ryža. 5.8. Štrukturálny diagram mriežkového filtra s konečnou impulznou odozvou. Štatistické metódy na zlepšenie presnosti sú rôznorodé a početné, ale delia sa aj na pasívne pre statické merania a aktívne pre dynamické merania, kedy sa meraná veličina mení v čase. V tomto prípade samotná nameraná hodnota, ako aj šum, sú náhodné veličiny s rôznymi rozptylmi. Adaptabilita metód na zlepšenie presnosti dynamických meraní by sa mala chápať ako použitie predpovedania hodnôt disperzií a chýb pre ďalší cyklus merania. Takáto predpoveď sa vykonáva v každom meracom cykle. Na tento účel sa používajú Wienerove filtre pracujúce vo frekvenčnej oblasti. Na rozdiel od Wienerovho filtra pracuje Kalmanov filter v časovej oblasti a nie vo frekvenčnej oblasti. Kalmanov filter bol vyvinutý pre viacrozmerné problémy formulované v maticovej forme. Maticový formulár je dostatočne podrobne opísaný na implementáciu v Pythone v článku. Popis činnosti Kalmanovho filtra uvedený v týchto článkoch je určený pre špecialistov v oblasti digitálneho filtrovania. Preto bolo potrebné zvážiť fungovanie Kalmanovho filtra v jednoduchšej skalárnej forme. Tu je G(t) blok, ktorého činnosť je opísaná lineárnymi vzťahmi. Na výstupe bloku je generovaný nenáhodný signál y(t). Tento signál sa pripočítava k šumu w(t), ktorý sa vyskytuje vo vnútri riadeného objektu. V dôsledku tohto sčítania dostaneme nový signál x(t). Tento signál je súčtom nenáhodného signálu a šumu a je to náhodný signál. Ďalej je signál x(t) transformovaný lineárnym blokom H(t), pričom sa pripočítava šum v(t) distribuovaný inak ako w(t) podľa zákona. Na výstupe lineárneho bloku H(t) získame náhodný signál z(t), ktorý slúži na určenie nenáhodného signálu y(t). Treba poznamenať, že lineárne funkcie blokov G(t) a H(t) môžu závisieť aj od času. Budeme predpokladať, že náhodné šumy w(t) a v(t) sú náhodné procesy s rozptylmi Q, R a nulovými matematickými očakávaniami. Signál x(t) po lineárnej transformácii v bloku G(t) je rozdelený v čase podľa normálneho zákona. Vzhľadom na vyššie uvedené bude pomer pre meraný signál mať tvar: Pri kontinuálnom dynamickom meraní sa každý ďalší stav objektu a tým aj hodnota riadenej hodnoty líši od predchádzajúcej podľa exponenciálneho zákona z konštantného času T v aktuálnom časovom intervale, Program na demonštráciu činnosti diskrétneho adaptívneho Kalmanovho filtra #!/usr/bin/env python #coding=utf8 import matplotlib.pyplot as plt import numpy as np z numpy import exp,sqrt from scipy.stats import norm Q=0.8;R=0.2;y=0;x=0 #počiatočné odchýlky šumu (ľubovoľne vybrané) a nulové hodnoty premenných. P=Q*R/(Q+R)# prvý odhad rozptylov šumu. T = 5,0 # časová konštanta. n=;X=;Y=;Z=#zoznamy premenných. pre i v np.arange(0,100,0.2): n.append(i)#časová premenná. x=1-exp(-1/T)+x*exp(-1/T)#funkcia modelu pre x. y=1-exp(-1/T)+y*exp(-1/T)# funkcia modelu pre y. Y.append(y)#kumulovať zoznam hodnôt y. X.append(x)# akumuluje zoznam hodnôt x. norm1 = norm(y, sqrt(Q))# normálne rozdelenie s #očakávaním – y. norm2 = norm(0, sqrt(R))#))# normálne rozdelenie s #očakávaním – 0. ravn1=np.random.uniform(0,2*sqrt(Q))#rovnomerné rozdelenie #pre šum s rozptylom Q . ravn2=np.random.uniform(0,2*sqrt(R))# rovnomerné rozdelenie #pre hluk s rozptylom R. z=norm1.pdf(ravn1)+norm2.pdf(ravn2)#meraná premenná z. Z.append(z)# akumuluje zoznam hodnôt z. P=P-(P**2)/(P+Q+R) #prechod do nového stavu pre x. x=(P*z+x*R)/(P+R)# nový stav x. Predikcia P=(P*R)/(P+R)# pre nový stav x. plt.plot(n, Y, color="g",linewidth=4, label="Y") plt.plot(n, X, color="r",linewidth=4, label="X") plt. plot(n, Z, color="b", linewidth=1, label="Z") plt.legend(loc="best") plt.grid(True) plt.show() V dôsledku predčasnej zmeny stavu porovnávanej premennej x(t) sa chyba zvýšila v oblasti prudkých zmien: Zatiaľ čo môj algoritmus používa počiatočný prediktívny odhad vplyvu hluku. To umožnilo znížiť chybu merania v(t). Daný algoritmus využíva dané - modelové exponenciálne funkcie, preto ich pre prehľadnosť uvádzame samostatne na všeobecnom grafe Kalmanovho filtra. Programový kód pre grafickú analýzu činnosti filtra #!/usr/bin/env python #coding=utf8 import matplotlib.pyplot as plt import numpy as np z numpy import exp,sqrt from scipy.stats import norm Q=0.8;R=0.2;y=0;x=0 #počiatočné odchýlky šumu (ľubovoľne vybrané) a nulové hodnoty premenných. P=Q*R/(Q+R)# prvý odhad rozptylov šumu. T = 5,0 # časová konštanta. n=;X=;Y=;Z=#zoznamy premenných. pre i v np.arange(0,100,0.2): n.append(i)#časová premenná. x=1-exp(-1/T)+x*exp(-1/T)#funkcia modelu pre x. y=1-exp(-1/T)+y*exp(-1/T)# funkcia modelu pre y. Y.append(y)#kumulovať zoznam hodnôt y. X.append(x)# akumuluje zoznam hodnôt x. norm1 = norm(y, sqrt(Q))# normálne rozdelenie s #očakávaním – y. norm2 = norm(0, sqrt(R))#))# normálne rozdelenie s #očakávaním – 0. ravn1=np.random.uniform(0,2*sqrt(Q))#rovnomerné rozdelenie #pre šum s rozptylom Q . ravn2=np.random.uniform(0,2*sqrt(R))# rovnomerné rozdelenie #pre hluk s rozptylom R. z=norm1.pdf(ravn1)+norm2.pdf(ravn2)#meraná premenná z. Z.append(z)# akumuluje zoznam hodnôt z. P=P-(P**2)/(P+Q+R) #prechod do nového stavu pre x. x=(P*z+x*R)/(P+R)# nový stav x. Predikcia P=(P*R)/(P+R)# pre nový stav x. plt.subplot(221) plt.plot(n, Y, color="g",linewidth=2, label="Funkcia modelu \n nehlučnej \n premennej") plt.legend(loc="najlepšie" ) plt. grid(True) plt.subplot(222) plt.plot(n, X, color="r",linewidth=2, label="Funkcia modelu \n \n porovnávanej premennej") plt.legend( loc="best" ) plt.grid(True) plt.subplot(223) plt.plot(n, Z, color="b", linewidth=1, label="Nameraná funkcia \n pseudonáhodných premenných") plt.legend(loc="best ") plt.grid(True) plt.subplot(224) plt.plot(n, Y, color="g",linewidth=2, label="Y") plt.plot( n, X, color="r ",linewidth=2, label="X") plt.plot(n, Z, color="b", linewidth=1, label="Z") plt.legend(loc= "najlepšie") plt.grid( Pravda) plt.show() Študenti, postgraduálni študenti, mladí vedci, ktorí pri štúdiu a práci využívajú vedomostnú základňu, vám budú veľmi vďační. MINISTERSTVO ŠKOLSTVA A VEDY RUSKEJ FEDERÁCIE VZDELÁVACIA INŠTITÚCIA S FEDERÁLNYM ŠTÁTNYM ROZPOČTOM VYŠŠIE ODBORNÉ VZDELANIE (FGBOU VPO) "ŠTÁTNA UNIVERZITA VORONĚŽ" FAKULTA APLIKOVANEJ MATEMATIKY, INFORMACIE A MECHANIKY KATEDRA TECHNICKEJ KYBERNETIKY A AUTOMATICKEJ REGULÁCIE Aplikácia adaptívnych filtrov na identifikáciu systému Práca na kurze Dokončené: študent 5. ročníka VŠ Litíková A.S. Vedecký poradca: d.p.m.s. Averina L.I. Voronež 2014 Úvod 2.1 Optimálny Wienerov filter 2.2 Adaptívny algoritmus LMS 2.4 Adaptívny algoritmus RLS 4. Implementácia modelov adaptívnych filtrov, porovnanie výsledkov Aplikácie Bibliografický zoznam Úvod Digitálne spracovanie signálu v zložitých rádioelektronických systémoch sa vyznačuje množstvom funkcií, ktoré komplikujú riešenie problémov rádiotechniky. Vo vysokokvalitných systémoch sa digitálne spracovanie signálu často vykonáva v podmienkach neistoty v systémových charakteristikách. Apriórne a aktuálne informácie o systémových parametroch sú neúplné. Okrem toho sa počas prevádzky systému môžu nepredvídaným spôsobom meniť parametre jeho objektov a operačného prostredia a nestacionárnosť potom pôsobí ako jeden z typov neistoty. Stochastické správanie je tiež dôležitou vlastnosťou, ktorá charakterizuje spracovanie signálu v zložitých systémoch. Je to spôsobené prítomnosťou zdrojov náhodného rušenia a všetkých druhov sekundárnych (z hľadiska riešenia problému) procesov s nepredvídateľným správaním. Stochasticita a nestacionárnosť objektov a podmienky ich fungovania teda určujú faktor zložitosti systému. Jedným z najsľubnejších spôsobov, ako prekonať ťažkosti spôsobené týmto faktorom zložitosti, je použitie adaptačných metód. Pri adaptívnom digitálnom spracovaní sa počas spracovania zhromažďujú informácie o objekte a vonkajších vplyvoch a používajú sa na zmenu parametrov blokov spracovania. Zariadenia na adaptívne spracovanie signálu fungujú na princípe uzavretej slučky. Vstupný signál je filtrovaný alebo vážený v programovateľnom filtri, aby sa získal výstupný signál, ktorý sa potom porovnáva s užitočným, štandardným alebo tréningovým signálom, aby sa našiel chybový signál. Tento chybový signál sa potom použije na úpravu hmotnosti procesora, aby sa chyba postupne minimalizovala. V tomto prípade adaptívny systém vyžaduje minimálny objekt počiatočnej informácie o prichádzajúcom signáli. Procesory rádiového spracovania možno rozdeliť do dvoch širokých tried: adaptívne filtre a adaptívne antény. Adaptívne antény vykonávajú priestorové spracovanie signálu pomocou anténneho poľa, pričom vytvárajú vyžarovací diagram tak, že v ňom vzniká hlavné maximum v smere príchodu signálu a nuly v smere zdrojov rušenia. Adaptívne digitálne filtre využívajú programovateľný filter, ktorého frekvenčná odozva alebo prenosová funkcia je zmenená alebo prispôsobená tak, aby prepúšťal užitočné zložky signálu bez skreslenia a tlmil nežiaduce signály alebo rušenie, t.j. znížiť skreslenie vstupného užitočného signálu. Adaptívny filter funguje na princípe odhadu štatistických parametrov prichádzajúceho signálu a úpravy vlastnej prechodovej odozvy týmto spôsobom. minimalizovať niektoré nákladové funkcie. Takéto adaptívne filtre sa často používajú na obnovenie signálov s časovo premenlivými charakteristikami na výstupoch kanálov. Účelom tejto práce v kurze je preskúmať a preštudovať vedeckú literatúru na uvažovanú tému, preskúmať fungovanie hlavných adaptačných algoritmov (algoritmus LMS, algoritmus RLS a algoritmus RLS s exponenciálnym zabúdaním) na príklade identifikácie 31. rádu. filter s impulznou odozvou v podobe exponenciálne sa rozpadajúcich sínusoidov. Okrem toho sa bude brať do úvahy reakcia algoritmov na náhle zmeny parametrov systému. 1. Hlavná myšlienka adaptívneho spracovania signálu Všeobecná štruktúra adaptívneho filtra je znázornená na obr. 1. Vstupný diskrétny signál x(k) je spracovaný diskrétnym filtrom, výsledkom čoho je výstupný signál y(k). Tento výstupný signál sa porovnáva s referenčným signálom d(k), rozdiel medzi nimi tvorí chybový signál e(k) Úlohou adaptívneho filtra je minimalizovať chybu reprodukcie referenčného signálu. Na tento účel, po spracovaní každej vzorky, adaptačný blok analyzuje chybový signál a ďalšie dáta prichádzajúce z filtra, pričom výsledky tejto analýzy použije na úpravu parametrov (koeficientov) filtra. Hostené na http://www.allbest.ru/ Ryža. 1. Všeobecná štruktúra adaptívneho filtra. Je možná aj iná možnosť prispôsobenia, pri ktorej sa nepoužíva referenčný signál alebo nie je možné priamo merať požadované parametre signálu. Tento spôsob prevádzky sa nazýva slepá adaptácia alebo učenie bez dozoru. Štúdium poslednej možnosti adaptácie nie je zahrnuté v rozsahu tejto práce. Ako filter v štruktúre znázornenej na obr. 1, najčastejšie používaný nerekurzívny digitálny filter. Jednou z hlavných výhod tohto variantu je, že nerekurzívny filter je stabilný pre akékoľvek hodnoty koeficientov. Malo by sa však pamätať na to, že adaptačný algoritmus v každom prípade zavádza spätnú väzbu do systému, v dôsledku čoho sa adaptívny systém ako celok môže stať nestabilným. Ďalej zvážime dva adaptívne algoritmy využívajúce vzorový signál, ktorý sa v praxi často používa v rôznych systémoch spracovania informácií. Pre zjednodušenie matematických výpočtov predpokladáme, že signály a filtre sú skutočné. Výsledné vzorce sa však dajú ľahko zovšeobecniť na prípad komplexných signálov a filtrov. 2. Adaptívne filtrovacie algoritmy 2.1 Optimálny Wienerov filter Pred zvažovaním samotných adaptačných algoritmov je potrebné určiť optimálne parametre filtra, o ktoré by sa mali tieto algoritmy snažiť. Prístup k problému optimálneho filtrovania môže byť štatistický aj deterministický. Najprv sa pozrime na štatistiku. Nech je vstupný diskrétny náhodný signál () spracovaný nerekurzívnym diskrétnym filtrom rádu N s koeficientmi (wn), n=0,1,…,n. Výstupom filtra je Okrem toho existuje príkladný (aj náhodný) signál d(k). Chyba reprodukcie vzorového signálu je rovná Je potrebné nájsť také koeficienty filtra (wn), ktoré zabezpečia maximálnu blízkosť výstupného signálu filtra k vzorovému, to znamená minimalizáciu chyby. Keďže ide tiež o náhodný proces, je rozumné brať stredný štvorec ako mieru jeho veľkosti. Optimalizovaná funkcia teda vyzerá takto Aby sme problém vyriešili, prepíšeme (2) do maticového tvaru. Aby sme to dosiahli, označíme stĺpcový vektor koeficientov filtra ako w a stĺpcový vektor obsahu oneskorovacej linky v k-tom kroku ako x(k): Potom (2) bude mať tvar: Druhá mocnina chyby je Štatistickým spriemerovaním tohto výrazu dostaneme nasledovné: Algoritmus adaptívneho filtra signálu Priemerné hodnoty zahrnuté vo výslednom vzorci majú nasledujúci význam: c je priemerná štvorec vzorového signálu, nezávisí od koeficientov filtra, preto môže byť vyradený; c je stĺpcový vektor krížových korelácií medzi k-tou vzorkou vzorového signálu a obsahom oneskorovacej čiary filtra v k-tom kroku. Budeme uvažovať náhodné procesy x(k) a spoločne stacionárne, potom vektor krížovej korelácie nezávisí od čísla kroku k. Označme tento vektor ako p: c - korelačná matica signálu, ktorá má veľkosť. Pre stacionárny náhodný proces má korelačná matica formu Toeplitzovej matice, to znamená, že pozdĺž jej uhlopriečok sú hodnoty korelačnej funkcie: kde je korelačná funkcia (CF) vstupného signálu. Berúc do úvahy zavedenú notáciu, (4) má nasledujúcu formu: Tento výraz je kvadratický tvar vzhľadom na w, a preto má pre nesingulárnu maticu R jediné minimum, na nájdenie ktorého je potrebné nastaviť vektor gradientu rovný nule: Odtiaľ dostaneme rovnosť: Vynásobením oboch častí vľavo inverznou korelačnou maticou získame požadované riešenie pre optimálne koeficienty filtra: Takýto filter sa nazýva Wienerov filter. Nahradením (8) za (5) získate minimálny dosiahnuteľný rozptyl chybového signálu: Je tiež ľahké ukázať, že chybový signál pre Wienerov filter nie je v korelácii so vstupnými a výstupnými signálmi filtra. 2.2 Adaptívny algoritmus LMS Jeden z najbežnejších adaptívnych algoritmov je založený na hľadaní minima cieľovej funkcie pomocou metódy najstrmšieho zostupu. Pri použití tejto optimalizačnej metódy závisí vektor koeficientov filtra w od iteračného čísla k: a musí byť pri každej iterácii posunutý o hodnotu úmernú gradientu cieľovej funkcie v danom bode, a to nasledovne: kde je kladný koeficient, nazývaný veľkosť kroku. Podrobná analýza konvergencie tohto procesu je uvedená napríklad v [Wienerov filter]. Ukazuje sa, že algoritmus konverguje, ak kde je maximálna vlastná hodnota korelačnej matice R. Rýchlosť konvergencie v tomto prípade závisí od rozšírenia vlastných hodnôt korelačnej matice R; čím menší je pomer, tým rýchlejšie konverguje iteračný proces. Na implementáciu algoritmu je však potrebné vypočítať hodnoty gradientu, a preto je potrebné poznať hodnoty matice R a vektora p. V praxi môžu byť dostupné len odhady týchto hodnôt získané zo vstupných údajov. Najjednoduchšie takéto odhady sú okamžité hodnoty korelačnej matice a krížového korelačného vektora získané bez akéhokoľvek spriemerovania: Pri použití týchto odhadov má vzorec nasledujúcu formu: Výraz v zátvorkách podľa (3) je rozdiel medzi referenčným signálom a výstupným signálom filtra v k-tom kroku, teda chyba filtrovania e(k). S ohľadom na túto skutočnosť sa výraz pre rekurzívnu aktualizáciu koeficientov filtra ukazuje ako veľmi jednoduchý: Algoritmus adaptívneho filtrovania založený na tomto vzorci sa nazýva LMS (Metóda najmenších štvorcov, metóda najmenších štvorcov). Rovnaký vzorec môžete získať trochu iným spôsobom: namiesto použitia gradientu štatisticky spriemerovaného štvorca chyby, gradientu jej okamžitej hodnoty. Analýza konvergencie algoritmu LMS sa ukazuje ako mimoriadne náročná úloha, pre ktorú neexistuje presné analytické riešenie. Pomerne podrobný rozbor pomocou aproximácií je uvedený v knihe S. Khaikina. Ukazuje, že horná hranica pre veľkosť kroku je v tomto prípade menšia ako pri použití skutočných hodnôt gradientu. Tento limit sa približne rovná: kde sú vlastné hodnoty korelačnej matice R a je stredná druhá mocnina vstupného signálu filtra. Normalizovaný algoritmus LMS je založený na vyššie uvedenom vzorci, v ktorom sa koeficient v každom kroku vypočíta na základe energie signálu obsiahnutého v oneskorovacej linke: kde µ0 je normalizovaná hodnota µ v rozsahu od 0 do 2 a e je malá kladná konštanta, ktorej účelom je obmedziť rast µ pri nulovom signáli na vstupe filtra. Aj keď LMS algoritmus konverguje, rozptyly koeficientov filtra pre k>? nemá tendenciu k nule – koeficienty kolíšu okolo optimálnych hodnôt. Z tohto dôvodu sa chyba filtrovania v ustálenom stave ukáže byť väčšia ako chyba Wienerovho filtra: kde Eex je stredná druhá mocnina nadmernej chyby algoritmu LMS. V tej istej knihe od S. Khaikina je uvedený nasledujúci približný vzorec pre takzvaný koeficient nesúladu, ktorý sa rovná pomeru stredných štvorcov prebytku a Wienerových chýb: Hodnota koeficientu µ ovplyvňuje dva hlavné parametre LMS filtra: rýchlosť konvergencie a faktor rozladenia. Čím väčšie µ, tým rýchlejšie algoritmus konverguje, ale tým väčší je koeficient rozladenia a naopak. Hlavnou výhodou algoritmu LMS je jeho extrémna výpočtová jednoduchosť - na úpravu koeficientov filtra v každom kroku je potrebné vykonať N + 1 párov operácií násobenia a sčítania. Cenou jednoduchosti je pomalá konvergencia a zvýšený (v porovnaní s minimálnou dosiahnuteľnou hodnotou) rozptyl chýb v ustálenom stave. 2.3 Problém deterministického optimálneho filtrovania Pri zvažovaní problému štatistickej optimalizácie bol vstupný signál považovaný za náhodný proces a rozptyl chyby reprodukcie vzorového signálu bol minimalizovaný. Možný je však aj iný prístup, ktorý nevyužíva štatistické metódy. Nech sa ako predtým spracuje postupnosť vzoriek (x(k)), koeficienty nerekurzívneho filtra rádu N tvoria množinu (wn) a vzorky vzorového signálu sa rovnajú (d(k) )). Výstupný signál filtra je určený vzorcom (1) a chyba reprodukcie vzorového signálu je určená vzorcom (2) alebo vo vektorovej forme (3). Teraz je optimalizačný problém formulovaný nasledovne: je potrebné nájsť také koeficienty filtra (wn), aby celková kvadratická chyba reprodukcie vzorového signálu bola minimálna: Na vyriešenie problému je potrebné prejsť vo vzorci (3) do maticového zápisu pozdĺž súradnice k, čím sa získajú vzorce pre stĺpcové vektory výstupného signálu y a pre chybu reprodukcie vstupného signálu e: Tu d je stĺpcový vektor vzoriek referenčného signálu a X je matica, ktorej stĺpce predstavujú obsah linky oneskorenia filtra pri rôznych hodinových cykloch: Výraz (18) pre celkovú kvadratickú chybu možno prepísať do maticovej formy takto: Nahradením (19) za (20) máme: Na nájdenie minima je potrebné vypočítať gradient tohto funkcionálu a prirovnať ho k nule: Z toho sa ľahko získa požadované optimálne riešenie: Vzorec ukazuje úzky vzťah so vzorcom (8), ktorý popisuje štatisticky optimálny Wienerov filter. V skutočnosti, ak vezmeme do úvahy to, čo dáva odhad korelačnej matice signálu získaného z jednej implementácie ergodického náhodného procesu časovým spriemerovaním, a je podobný odhad vzájomných korelácií medzi vzorovým signálom a obsahom filtra oneskorovacia čiara, potom sa vzorce (8) a (21) budú zhodovať. 2.4 Adaptívny algoritmus RLS V zásade je možné v procese príjmu signálu prepočítať koeficienty filtra priamo pomocou vzorca (21) v každom nasledujúcom kroku, čo je však spojené s neprimerane vysokými výpočtovými nákladmi. Veľkosť matice X sa totiž neustále zväčšuje a navyše je potrebné inverznú maticu zakaždým prepočítať. Výpočtové náklady môžete znížiť, ak si všimnete, že v každom kroku sa do matice X pridá iba jeden nový stĺpec a do vektora d sa pridá jeden nový prvok. To umožňuje organizovať výpočty rekurzívne. Zodpovedajúci algoritmus sa nazýva rekurzívna metóda najmenších štvorcov (Recursive Least Square, RLS). V k-tom kroku sa optimálny vektor koeficientov filtra podľa (21) rovná V každom kroku sa do matice X pridá nový stĺpec x(k+1) a do vektora d sa pridá nový prvok d(k+1): Pri použití algoritmu RLS sa vykoná rekurzívna aktualizácia odhadu inverznej korelačnej matice. Keď prejdeme na ďalší krok, máme: Teraz používame maticovú identitu kde A a C sú ľubovoľné štvorcové nesingulárne matice a B a D sú ľubovoľné matice kompatibilných veľkostí. Vytvorte korešpondenciu medzi (24) a (25): c (štvorcová matica); c(stĺpcový vektor); c(skalárny); s (riadkový vektor). Výsledkom je, že (24) možno zapísať takto: Všimnite si, že fragment výrazu zvýšený na mínus prvú mocninu je skalár. Pre koeficienty filtra používame (23) a (26) vo výraze (22): Rozšírime zátvorky: Prvý člen vo výslednom vzorci podľa (22) sú koeficienty optimálneho filtra pre k-tý krok - w(k). Rovnaký vektor môže byť vybraný ako faktor v druhom termíne. V treťom a štvrtom člene môžeme rozlíšiť spoločný faktor P(k)x(k+1)d(k+1): Po vykonaní výpočtu v zátvorkách a vybratí spoločného faktora dostaneme: Všimnite si, že súčin je výsledkom spracovania vstupného signálu prijatého v k-tom kroku filtrom so starými koeficientmi w(k). To znamená, že tento produkt je výstupom adaptívneho filtra y(k+1). Rozdiel v zátvorkách je teda chyba filtrovania e(k+1): Teraz zavedieme zápis pre vektorový faktor vyňatý zo zátvoriek: S ohľadom na to bude mať vzorec pre koeficienty filtra tvar: Vektor K(k+1) sa nazýva vektor zisku. Takže pri použití adaptívneho algoritmu RLS je potrebné v každom cykle vykonať nasledujúce kroky: 1. Keď prídu nové vstupné dáta x(k), signál sa filtruje pomocou aktuálnych koeficientov filtra w(k-1) a vypočíta sa hodnota chyby reprodukcie vzorového signálu: 2. Vypočíta sa stĺpcový vektor ziskov (treba si uvedomiť, že vektor K sa zakaždým prepočítava, t.j. výpočty nie sú rekurzívne, a tiež, že menovateľom zlomku je skalár): 3. Aktualizuje sa odhad inverznej korelačnej matice signálu: Nakoniec sa aktualizujú koeficienty filtra: Pokiaľ ide o rekurzívne aktualizovanú maticu P a vektor w, vektor w sa zvyčajne považuje za nulový a analýza matice P ukazuje, že po naplnení oneskorovacej linky filtra vzorkami signálu nebude výsledok závisieť od počiatočných podmienok. ak V praxi je uhlopriečka vyplnená veľkými kladnými číslami, napríklad 100/y2x. V porovnaní s algoritmom LMS vyžaduje algoritmus RLS oveľa väčší počet výpočtových operácií (pri optimálnej organizácii výpočtov 2,5N2+4N párov operácií násobenia-sčítania). Optimálna organizácia sa tu chápe ako zohľadňovanie symetrie matice P. Počet operácií v algoritme RLS sa teda zvyšuje kvadraticky so zvyšujúcim sa poradím filtra. Algoritmus RLS však konverguje oveľa rýchlejšie ako algoritmus LMS. Presne povedané, nejde ani o postupný aproximačný algoritmus, pretože v každom kroku dáva optimálne koeficienty filtra zodpovedajúce vzorcu (21). 2.5 Algoritmus RLS s exponenciálnym zabúdaním Vo vzorcoch (18) a (20) majú chybové hodnoty vo všetkých časových cykloch rovnakú váhu. V dôsledku toho, ak sa štatistické vlastnosti vstupného signálu časom menia, zhorší to kvalitu filtrovania. Aby filter mohol sledovať nestacionárny vstupný signál, je možné použiť exponenciálne zabudnutie v (18), v ktorom váha minulých hodnôt chybového signálu klesá exponenciálne: kde ja som faktor zabúdania, Keď sa použije exponenciálne zabúdanie, vzorce (28) a (29) majú nasledujúcu formu: 3. Adaptívne filtre v identifikácii systému Adaptívne filtre sa v súčasnosti používajú v mnohých systémoch spracovania rádiového a telekomunikačného signálu. Všetky metódy používania adaptívnych filtrov sa však tak či onak redukujú na riešenie problému identifikácie, to znamená na určenie charakteristík určitého systému. Existujú dve možnosti identifikácie – priama a spätná. V prvom prípade je adaptívny filter zapnutý paralelne so skúmaným systémom (obr. 2, a). Hostené na http://www.allbest.ru/ Obr.2 Identifikácia systémov pomocou adaptívneho filtra: a - priamy, b - spätný. Vstupný signál je spoločný pre skúmaný systém a adaptívny filter a výstupný signál systému slúži ako referenčný signál pre adaptívny filter. Počas adaptačného procesu budú časové a frekvenčné charakteristiky filtra smerovať k zodpovedajúcim charakteristikám skúmaného systému. Pri spätnej identifikácii sa adaptívny filter zapína v sérii so skúmaným systémom (obr. 2, b). Výstup systému sa privádza na vstup adaptívneho filtra a vstupom systému je vzorka pre adaptívny filter. Filter sa teda snaží kompenzovať vplyv systému a obnoviť pôvodný signál elimináciou skreslení spôsobených systémom. 4. Implementácia modelov adaptívnych filtrov V práci implementujeme riešenie problému priamej identifikácie systému podľa obr. 2.a pomocou troch algoritmov - LMS, RLS a RLS s exponenciálnym zabúdaním. Vstupným signálom bude diskrétny biely Gaussov šum a samotný systém bude nerekurzívnym filtrom 31. rádu s impulznou odozvou v podobe exponenciálne klesajúcej sínusoidy, ktorej perióda kmitania sú štyri vzorky. Navyše, po spracovaní polovice vstupného signálu sa náhle zmenia parametre systému - jeho impulzná odozva zmení znamienko. To nám umožní pozrieť sa na to, ako algoritmy reagujú na prudkú zmenu štatistických vlastností spracovávaného signálu. Text programu, ktorý implementuje algoritmy, nájdete v prílohe 1. Porovnanie modelov Takže na obrázku 3 môžete vidieť, že v počiatočnom štádiu algoritmy RLS vykazujú oveľa rýchlejší prechod a menšiu chybu v porovnaní s algoritmom LMS. Teraz sa pozrime bližšie na časovú chybu v počiatočnom štádiu (obr. 4.). Obrázok 4 ukazuje, že algoritmy LMS a RLS poskytujú približne rovnakú chybu v ustálenom stave, zatiaľ čo algoritmus RLS s exponenciálnym zabúdaním prakticky nedáva chybu. Vráťme sa k obr. 3 a prejdime k prudkej zmene charakteristík systému. Tu vidíme, že algoritmus LMS po určitom prechodnom procese znížil chybu filtrovania na rovnakú úroveň, akú mal predtým, ale RLS sa nedokázal prispôsobiť zmeneným podmienkam. Obr.3. Výsledky identifikácie systému pomocou algoritmov LMS (horný riadok), RLS (stredný riadok) a RLS s exponenciálnym zabúdaním (spodný riadok): vľavo - závislosť chyby od času, vpravo - konečné impulzné odozvy filtre. Obr.4. Zväčšený graf chýb z času na zmenu charakteristík systému. Exponenciálne zabúdajúci algoritmus RLS (ktorý má schopnosť sledovať zmeny v štatistických vlastnostiach spracovaného signálu) sa však dobre vyrovnal s meniacimi sa charakteristikami systému a dokonca aj s menej prechodnými ako LMS. Potvrdzujú to konečné impulzné odozvy filtrov (obr. 3 vpravo) - charakteristiky LMS filtra a RLS s exponenciálnym zabúdaním sú v dobrej zhode s exponenciálne klesajúcimi osciláciami impulznej odozvy analyzovaného systému (obr. 6) a odozva filtra RLS vyzerá ako náhodná množina hodnôt. Ak zväčšíme grafy chyby filtrovania po zmene charakteristík systému (obr. 6), potom vidíme, že algoritmus RLS s exponenciálnym zabúdaním, ako predtým, dáva menšiu chybu ako algoritmus LMS. Algoritmus RLS v tejto fáze neuvažujeme, pretože jeho chybu je možné vidieť na obr. 3 a nie je porovnateľná s chybami iných algoritmov. Obr.5. Zväčšený graf chýb filtrovania po preskakovaní systému Obr.6. Impulzná odozva systému Vykonaná práca ukázala, že LMS algoritmus si dobre poradí so stacionárnym signálom aj so signálom s meniacimi sa charakteristikami. Algoritmus RLS vo svojej "čistej" forme poskytuje vynikajúce výsledky pre stacionárny signál, ale nie je schopný vyrovnať sa so zmenou charakteristík systému. Algoritmus RLS s exponenciálnym zabudnutím funguje dobre na oboch vyššie uvedených signáloch a vykazuje oveľa menší prechodný jav a menšiu chybu v porovnaní s inými uvažovanými algoritmami. Nezabudnite však, že algoritmy RLS vyžadujú oveľa väčší výpočtový výkon ako LMS (2,5N2 + 4N párov operácií násobenia a sčítania v porovnaní s N + 1 pármi operácií v každom kroku pre LMS). Na základe toho môžeme konštatovať, že v prípadoch, ktoré nevyžadujú vysokú presnosť, je najvhodnejšie použiť algoritmus LMS. Ak sa vyžaduje vysoká presnosť a dostatočný výpočtový výkon, vhodnejšie sú algoritmy RLS. Okrem toho je potrebné mať na pamäti, že algoritmus RLS vo svojej "čistej" forme môže byť použitý iba v systémoch so stacionárnym signálom. Ak sa môže zmeniť charakter signálu, je potrebné použiť algoritmus RLS s exponenciálnym zabúdaním. Aplikácie Príloha 1 Implementácia adaptívnych filtrov v MATLAB Najprv vytvoríme vstupné a výstupné signály identifikovaného systému: x=randn(2000,1); % diskrétny biely Gaussov šum b=exp(-t/5).*cos(t*pi/2); % impulznej odozvy systému % generuje prvú polovicu výstupného signálu Filter(b, 1, x(1:1000)); % generuje druhú polovicu výstupného signálu y(1001:2000) = filter(-b, 1, x(1001:2000), stav); Ďalej vytvoríme objekty adaptívneho filtra pomocou zodpovedajúcich konštruktorov. Pre algoritmus LMS predbežne vypočítame hodnotu koeficientu m, pričom ho zvolíme dvakrát menšiu ako je limitná hodnota určená vzorcom (15) a pre algoritmus RLS s exponenciálnym zabúdaním berieme n=0,6. Pre všetky ostatné parametre použite predvolenú hodnotu: %vytvoriť objekty adaptívneho filtra LMS a RLS N = 32; % dĺžky filtrov mu = 1/N/var(y); % veľkosť kroku pre LMS ha_lms = adaptfilt.lms(N,mu); % vytvorenia objektu pre LMS ha_rls = adaptfilt.rls(N); % vytvorenia objektu pre RLS ha_erls = adaptfilt.rls(N,0,6); % vytvárania objektov pre RLS s exponenciálnym zabúdaním Teraz implementujeme filtrovanie pomocou funkcie filter. V súlade s obr. 2 a vstupný signál adaptívneho filtra sa zhoduje so vstupným signálom skúmaného systému (x) a vzorovým signálom je výstupný signál systému (y): %implementovať filtrovanie: Filter(ha_lms, x, y); Filter(ha_rls, x, y); Filter(ha_erls, x, y); Teraz zostavme impulznú odozvu systému (obr. 3) a grafy závislosti chybového signálu od času a tiež zobrazme impulzné odozvy filtrov získané v čase ukončenia spracovania signálu (obr. 4): % zostavených grafov: title("chyba LMS") os() impz(ha_lms.coefficients) title("Impulzná odozva LMS") title("RLS chyba") os() impz(ha_rls.coefficients) title("Impulzná odozva RLS") os() title("chyba eRLS") os() impz(ha_erls.coefficients) title("eRLS impulzná odozva") title("Impulzná odozva systému") Bibliografický zoznam 1. Sergienko A.B. Digitálne spracovanie signálu.-- 3. vyd. - Petrohrad: BHV-Petersburg, 2011. - 768 s. 2. Khaykin S. Neurónové siete. Celý kurz. - M.: Williams, 2006. - 1104 s. 3. Adaptívne filtre: Per. Z angličtiny / [Ed. C.F.N. Cowen a P.M. Grant]. - M.: Mir, 1988. - 392 s. 4. Šachtarin B.I. Náhodné procesy v rádiotechnike: Séria prednášok. - M.: Rádio a komunikácia, 2000. - 584 s. 5. Základy digitálneho spracovania signálov: kurz prednášok / A. I. Solonin, D. A. Ulakhovich, S. M. Arbuzov, E. B. Solovieva. -- 2. vyd., prepracované. a správne. - Petrohrad: BHV-Petersburg, 2005. - 768 s. 6. Solonin A.I. Digitálne spracovanie signálu. Modelovanie v MATLABE / A.I. Solonin, S.M. Arbuzov. - Petrohrad: BHV-Petersburg, 2008. - 816 s. 7. Dzhigan V. Adaptívne filtre. Moderné modelovacie nástroje a príklady implementácie. / V. Dzhigan // Elektronika: podnikanie v oblasti vedy a techniky. - 2012. - č. 7 (00121). -- S. 106-125. 8. Seogienko A.B. Algoritmy adaptívneho filtrovania: Funkcie implementácie v MATLAB. / A.B.Sergienko // Exponenta Pro. -- 2003. -- č. 1(1). -- S. 18-28. Hostené na Allbest.ru Klasifikácia adaptívnych systémov. Výhody a nevýhody typov a tried adaptívnych, samonastavovacích systémov. Vývoj pôvodnej schémy adaptívneho systému. Systémy s hlavnou stabilizáciou obrysu, identifikátorom alebo prepracovaným objektovým modelom. článok, pridaný 24.07.2013 Pevné a flexibilné prahy filtrovania rečového signálu. Grafy vlnkového rozkladu rečového signálu. Bloková schéma filtračného algoritmu s flexibilným prahom. Štatistická metóda filtrovania rečových signálov. Hodnotenie kvality obnoveného rečového signálu. abstrakt, pridaný 12.01.2008 Výskum digitálneho spracovania signálov a jeho aplikácie v rôznych oblastiach činnosti. Štúdium výhod a nevýhod mediánového filtrovania. Analýza princípov fungovania mediánových filtrov. Implementácia mediánového filtrovania pomocou MatLab712 R2011a. semestrálna práca, pridané 07.04.2013 Počiatočné údaje pre výpočet pasívnych RC filtrov. Výpočet parametrov filtračného prvku. Frekvenčné filtre pre elektrické signály sú navrhnuté tak, aby zlepšili odolnosť rôznych elektronických zariadení a systémov voči šumu. Parametre reálnych filtrov. test, pridané 04.10.2008 Charakterizácia hlavných požiadaviek na metódy a algoritmy filtrovania. Predpoklady pre výskyt rušenia a skreslenia. Vlastnosti filtrov založených na ortogonálnych a diskrétnych kosínusových transformáciách. Použitie filtra s premenlivou veľkosťou okna. semestrálna práca, pridaná 12.08.2011 Všeobecné amplitúdovo-frekvenčné charakteristiky (AFC) rôznych typov filtrov. Konštrukcia obvodu horno- a dolnopriepustného filtra: aktívne a pasívne filtre prvého a druhého rádu. Princíp činnosti, funkcie a použitie pásmových a zárezových filtrov. abstrakt, pridaný 18.12.2011 Klasifikácia rádiofrekvenčných identifikačných systémov (RFI) a ich rozsah. Zloženie RFID systému, fyzikálne princípy fungovania. Výhody a nevýhody RFID. Charakteristika RFID systémov a ich prvkov, medzinárodné štandardy. abstrakt, pridaný 15.12.2010 Klasifikácia akustických lokalizačných systémov podľa účelu a typu primárneho meniča, podľa povahy frekvenčného spektra signálu, podľa typu modulačného účinku, podľa selektivity. Rozsah snímačov polohy. Identifikačný algoritmus. ročníková práca, pridaná 8.11.2010 Konštrukcia elektrických filtrov, technológia ich výroby, princíp činnosti. Preneste miery a parametre filtra. Ich použitie vo viackanálových komunikačných systémoch, rádiových zariadeniach, automatizačných zariadeniach, telemechanike. Nízkopriepustné filtre. test, pridané 04.07.2016 Podstata a princíp fungovania vyhladzovacích filtrov. Klasifikácia a typy. Hodnoty, ktoré charakterizujú kvalitu filtra. Výpočet vyhladzovacieho faktora. Návrh aktívnych a pasívnych vyhladzovacích filtrov: výhody, nevýhody, použitie. Hlavnou vlastnosťou adaptívneho systému je časovo premenná samoregulačná prevádzka. Nevyhnutnosť takéhoto fungovania je zrejmá z nasledujúcej úvahy. Ak vývojár navrhne „nezmeniteľný“ systém, ktorý považuje za optimálny, potom to znamená, že vývojár predvída všetky možné podmienky na jeho vstupe, aspoň v štatistickom zmysle, a očakáva, že systém bude fungovať za každej z týchto podmienok. Dizajnér potom zvolí kritérium, podľa ktorého by sa mal výkon posudzovať, ako je priemerný počet chýb medzi výstupom skutočného systému a výstupom niektorého zvoleného modelu alebo „ideálneho“ systému. Nakoniec vývojár vyberie systém, ktorý funguje najlepšie podľa stanovených výkonnostných kritérií, zvyčajne z nejakej a priori ohraničenej triedy (napríklad z triedy lineárnych systémov). V mnohých prípadoch však nemusí byť presne známy celý rozsah vstupných podmienok, dokonca ani v štatistickom zmysle, alebo sa podmienky môžu z času na čas meniť. Potom má adaptívny systém, ktorý pomocou bežného procesu vyhľadávania neustále hľadá optimum v rámci prípustnej triedy možností, výhody oproti nemennému systému. Adaptívne systémy zo svojej podstaty musia byť časovo premenlivé a nelineárne. Ich vlastnosti závisia okrem iného aj od vstupných signálov. Ak je na vstup privedený signál x 1, tak sa naň adaptívny systém naladí a vygeneruje výstupný signál – nazvime ho y 1 . Ak sa na vstup privedie ďalší signál x 2, potom sa systém na tento signál naladí a vygeneruje výstupný signál – nazvime ho y 2 . Vo všeobecnosti sa štruktúra a korekčné procesy adaptívneho systému budú líšiť pre dva rôzne vstupné signály. Na získanie optimálneho riešenia existuje veľa metód na úpravu hodnôt koeficientov hmotnosti filtra. Boli použité metódy náhodných porúch, ktoré zmenili hmotnostné koeficienty filtra; ďalej sa analyzoval vstupný signál, aby sa zistilo, či sa jeho náhodná porucha blíži k požadovanému riešeniu alebo ho od neho vzďaľuje. V súčasnosti sa na výpočet váhových koeficientov adaptívnych filtrov široko používa adaptívny algoritmus najmenších štvorcov (LSM), pretože používa gradientové metódy, ktoré sú oveľa efektívnejšie ako iné pri poskytovaní konvergencie k optimálnemu riešeniu. Je možné ukázať, že gradientová metóda najmenších štvorcov je veľmi podobná metóde maximalizácie pomeru signál-šum, ktorá bola vyvinutá na použitie v prípadoch, keď je potrebné získať optimálne váhové koeficienty pre adaptívne anténne polia. Tiež sa ukázalo, že Lucky nulovací filter je zjednodušením všeobecnejšej metódy najmenších štvorcov gradientu. Adaptívny filter je teda filter, ktorého prenosová funkcia (alebo frekvenčná charakteristika) je prispôsobená, t.j. je zmenený tak, aby prenášal užitočné zložky signálu bez skreslenia a tlmil nežiaduce signály alebo rušenie. Schéma adaptívneho filtra je znázornená na obrázku 5.5. Obr.5.5. Adaptívny filter Takýto filter funguje na princípe odhadu štatistických parametrov signálu a úpravy vlastnej prenosovej funkcie tak, aby sa minimalizovala nejaká objektívna funkcia. Táto funkcia sa zvyčajne vytvára pomocou „referenčného“ signálu na referenčnom vstupe. Tento referenčný signál možno považovať za požadovaný signál na výstupe filtra. Úlohou adaptačného bloku je upraviť koeficienty digitálneho filtra tak, aby sa minimalizoval rozdiel n = n - n, ktorý určuje chybu vo filtri. Najdôležitejšou funkciou, ktorú vykonáva adaptívny filter, je modelovanie systému. Toto je znázornené na obr. 5.6, kde je primárny signál s rovnomernou spektrálnou hustotou privedený priamo alebo na vstup s, alebo na vstupe r adaptívny filter. Primárny signál vstupuje do systému s impulznou odozvou H(n), výstup systému je pripojený k druhému vstupu adaptívneho filtra. Na získanie optimálnych hmotnostných vektorov H opt adaptívneho filtra možno použiť dva rôzne prístupy, ktoré povedú k úplne odlišným výsledkom. To sa deje v nasledujúcich prípadoch: 1. Neznámy systém H(n) pripojený na vstup r adaptívny filter (obr. 5.6, a). V tomto prípade je optimálna impulzná odozva adaptívneho filtra presným modelom zodpovedajúcej odozvy systému H(n). 2. Neznámy systém H(n) pripojený na vstup s adaptívneho filtra (obr. 5.6, b). V tomto prípade je optimálna impulzná odozva adaptívneho filtra inverzná funkcia zodpovedajúcej odozvy neznámeho systému. Ryža. 5.6. Aplikácia adaptívneho filtra na priame modelovanie systému: Hopt =H(n) (a) a inverzné modelovanie systému: Hopt = H-1 (n) (b). Praktickým príkladom ilustrujúcim činnosť prvého typu adaptívneho filtra (tj priama simulácia systému) je potlačenie odrazeného signálu v hybridnej telefónnej linke. Príkladom, ktorý možno použiť na ilustráciu princípu adaptívneho filtra, ktorý modeluje inverznú odozvu systému, je korekcia skreslení pri prenose dát po telefónnych linkách. V tomto prípade je vstup telefónnej linky vybudený známym signálom a skreslený signál z výstupu linky je privádzaný na vstup s(n) adaptívny filter. Filter sa potom prestaví pomocou vstupu y(n) sekvenčný rad známych (neskreslených) primárnych signálov. Adaptívny filter modeluje inverznú impulznú odozvu vedenia, aby na výstupe produkoval filtrované (bez skreslenia) údaje. Ďalšou oblasťou použitia adaptívnych filtrov je potlačenie šumu. V tejto schéme sa primárny signál obsahujúci požadované informácie spolu s rušivým signálom privádza na vstup y(n). Potom z iného zdroja, ktorý neobsahuje žiadne zložky pôvodného signálu, prichádza nezávislý korelovaný signál - vzorka rušivého signálu. Ak tento korelovaný signál ide priamo na vstup s(n) adaptívny filter, filter generuje impulznú odozvu, ktorá poskytuje výstupný signál y(n), ktorý súvisle odčítava od y(n) nežiaduci komponent, opúšťa výstup e(n) len požadovaný signál. Jedným z príkladov použitia tejto metódy je záznam srdcového tepu plodu. Primárny signál pochádza z prevodníka umiestneného na povrchu brucha matky. Tento prevodník generuje signál obsahujúci pulzy srdcového tepu plodu, ktoré sú však v podstate maskované srdcovým tepom matky. Potom sa z druhého meniča umiestneného na hrudi matky prijme sekundárny signál, ktorý registruje iba tlkot srdca matky. Ďalej adaptívny filter modeluje dráhu skreslenia od prevodníka umiestneného na hrudníku k prevodníku umiestnenému na bruchu, aby získal signál, ktorý je koherentne odčítaný od signálu z brucha. Adaptívne filtre sa používajú aj v iných aplikáciách, napríklad na elimináciu hluku motora v mikrofóne pilota v kokpite lietadla alebo na potlačenie okolitého akustického hluku, napríklad vo veľkých elektrárňach. Ďalšou aplikáciou adaptívnych filtrov je implementácia samoladiaceho filtra používaného na izoláciu sínusoidy maskovanej širokopásmovým šumom. Takáto aplikácia v adaptívnom lineárnom zosilňovači (ALU) sa vykonáva privedením signálu priamo na vstup filtra y(n) a aplikovanie modifikácie signálu s časovým oneskorením na vstup filtra s(n). Ak je oneskorenie väčšie ako prevrátená hodnota šírky pásma filtra, zložky šumu dvoch vstupov nebudú korelovať. Adaptívny filter vydáva sínusoidu so zvýšeným odstupom signálu od šumu, zatiaľ čo sínusové zložky na výstupe chybového signálu klesajú. Adaptívne filtre typu IIR sa používajú hlavne na riešenie problémov, ako je zmiernenie vplyvu šírenia viaccestného signálu v radarových a rádiových komunikačných systémoch. V tomto prípade prijímaný signál obsahuje pôvodný vysielaný signál konvolvovaný s kanálovou impulznou odozvou, ktorá v multipath obsahuje iba nuly. Potom, aby sa eliminovalo rušenie rušenia, adaptívny prijímač modeluje charakteristiku, ktorá je inverzná k charakteristike kanálu (obr. 5.6, b). To sa najefektívnejšie dosiahne použitím modelu adaptívneho filtra s odozvou iba na pól, pričom polohy pólov sa vyberú tak, aby zodpovedali nulám v odozve kanála. Pri návrhu adaptívneho FIR filtra je možné brať do úvahy aj tento model, ale je ekonomickejšie použiť rekurzívnu štruktúru, keďže implementuje inverznú štruktúru filtra pri nižšom ráde filtra a s nižšími hmotnosťami. Preto môžeme s dobrým dôvodom povedať, že takáto štruktúra poskytne rýchlejšiu konvergenciu ako jej priečny náprotivok. Na zabezpečenie stability adaptívneho rekurzívneho filtra je však potrebný vysoký stupeň presnosti pri výpočte digitálneho obvodu. Metóda adaptívneho spracovania signálu založená na filtroch typu IIR sa používa v elektronických radarových meracích prijímačoch na izoláciu impulzov. Adaptívne Kalmanove filtre sú zaujímavé na identifikáciu typov radarových oscilácií generovaných určitými typmi žiaričov. Používajú sa aj pri filtrovaní a viaccestnom zmierňovaní vo vysokofrekvenčných (3 až 30 MHz) digitálnych komunikačných kanáloch, kde je podstatná vysoká miera konvergencie týchto filtrov. Väčšina FIR filtrov je postavená s pomerne jednoduchými bežnými predpokladmi. Tieto predpoklady vedú k dobre známym jednoduchým adaptačným algoritmom (napr. LSM), ktorých implementácia je podrobná z hľadiska miery konvergencie, zvyškovej chyby atď. Tento prístup sa najčastejšie používa pri aplikácii adaptívnych filtrov v systémoch komunikácie na veľké vzdialenosti, napríklad na vyrovnanie a tlmenie odrazeného signálu. V roku 1971 Chang významne prispel k klasifikácii typov filtrov: pokúsil sa spojiť všetky prístupy a vytvoriť jednu zovšeobecnenú štruktúru ekvalizéra, alebo korekčný filter (obr. 5.7.). Táto štruktúra obsahuje sadu ľubovoľných filtrov pripojených k lineárnemu váhovému a kombinačnému obvodu. Filter typu FIR možno odvodiť z tejto zovšeobecnenej štruktúry nahradením ľubovoľného filtra napojenou oneskorovacou linkou, čím sa na výstupe získa séria časovo oneskorených vzoriek signálu. Filter typu IIR vďaka prítomnosti rekurzívnych spätnoväzbových prvkov ďalej spracováva signál na získanie vzoriek signálu s časovým oneskorením, ktoré sú postupne privádzané do vážiacich a zlučovacích obvodov.
Informácie o stave čítača 1 (signál q) z výstupov čítača sú privádzané do jednotky generovania impulzného vzorkovacieho signálu 3. V najjednoduchšom prípade môže byť touto jednotkou prahové zariadenie (podľa číselného kódu Q), ktoré otvára okruh 3, vzorkovanie má však v tomto prípade charakter blízky štatistickému, len pre dostatočne malé rozdiely vo frekvencii prietokov n a m/R (rádovo n
5.8. adaptívne filtre.

Obr.5.5. Adaptívny filter

Trochu teórie
Zvážte Kalmanov filtračný obvod pre jeho diskrétnu formu. Formulácia problému
Po filtrovaní musíte získať maximálnu možnú aproximáciu y"" k nenáhodnému signálu y(t). 
Nasleduje program Python, ktorý rieši rovnicu pre neznámy nešumový signál y(t). Proces merania sa uvažuje pre súčet dvoch pseudonáhodných premenných, z ktorých každá je vytvorená ako funkcia normálneho rozdelenia z rovnomerného rozdelenia.Aký je rozdiel medzi navrhovaným a známym algoritmom?
Vylepšil som algoritmus Kalmanovho filtra uvedený v pokynoch pre Mathcad: 


Výsledok programu

závery
Článok popisuje model jednoduchej skalárnej implementácie Kalmanovho filtra pomocou sharewarového univerzálneho programovacieho jazyka Python, ktorý rozšíri rozsah jeho aplikácie pre vzdelávacie účely. Odoslanie dobrej práce do databázy znalostí je jednoduché. Použite nižšie uvedený formulár
Podobné dokumenty


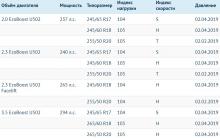
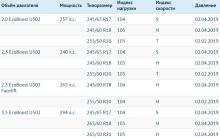







Rozmýšľame, ako obnoviť Skype na prenosnom počítači
Fixies masters plná verzia Fixies hra plná verzia stiahnutá do vášho počítača
Inštalácia alebo aktualizácia, oprava chýb Net framework 3
Virtuálne meny a virtuálne burzy vo svete
Zlaté čísla Ako predať krásne telefónne číslo