- Tutorial
Давно хотел написать общую статью, содержащую в себе самые основы Image Recognition, некий гайд по базовым методам, рассказывающий, когда их применять, какие задачи они решают, что возможно сделать вечером на коленке, а о чём лучше и не думать, не имея команды человек в 20.
Какие-то статьи по Optical Recognition я пишу давненько, так что пару раз в месяц мне пишут различные люди с вопросами по этой тематике. Иногда создаётся ощущение, что живёшь с ними в разных мирах. С одной стороны понимаешь, что человек скорее всего профессионал в смежной теме, но в методах оптического распознавания знает очень мало. И самое обидное, что он пытается применить метод из близрасположенной области знаний, который логичен, но в Image Recognition полностью не работает, но не понимает этого и сильно обижается, если ему начать рассказывать что-нибудь с самых основ. А учитывая, что рассказывать с основ - много времени, которого часто нет, становится всё ещё печальнее.
Эта статья задумана для того, чтобы человек, который никогда не занимался методами распознавания изображений, смог в течении 10-15 минут создать у себя в голове некую базовую картину мира, соответствующую тематике, и понять в какую сторону ему копать. Многие методы, которые тут описаны, применимы к радиолокации и аудио-обработке.
Начну с пары принципов, которые мы всегда начинаем рассказывать потенциальному заказчику, или человеку, который хочет начать заниматься Optical Recognition:
- При решении задачи всегда идти от простейшего. Гораздо проще повесить на персону метку оранжевого цвета, чем следить за человеком, выделяя его каскадами. Гораздо проще взять камеру с большим разрешением, чем разрабатывать сверхразрешающий алгоритм.
- Строгая постановка задачи в методах оптического распознавания на порядки важнее, чем в задачах системного программирования: одно лишнее слово в ТЗ может добавить 50% работы.
- В задачах распознавания нет универсальных решений. Нельзя сделать алгоритм, который будет просто «распознавать любую надпись». Табличка на улице и лист текста - это принципиально разные объекты. Наверное, можно сделать общий алгоритм( хороший пример от гугла), но это будет требовать огромного труда большой команды и состоять из десятков различных подпрограмм.
- OpenCV - это библия, в которой есть множество методов, и с помощью которой можно решить 50% от объёма почти любой задачи, но OpenCV - это лишь малая часть того, что в реальности можно сделать. В одном исследовании в выводах было написано: «Задача не решается методами OpenCV, следовательно, она неразрешима». Старайтесь избегать такого, не лениться и трезво оценивать текущую задачу каждый раз с нуля, не используя OpenCV-шаблоны.
Список приведённых тут методов не полон. Предлагаю в комментариях добавлять критические методы, которые я не написал и приписывать каждому по 2-3 сопроводительных слова.
Часть 1. Фильтрация
В эту группу я поместил методы, которые позволяют выделить на изображениях интересующие области, без их анализа. Большая часть этих методов применяет какое-то единое преобразование ко всем точкам изображения. На уровне фильтрации анализ изображения не производится, но точки, которые проходят фильтрацию, можно рассматривать как области с особыми характеристиками.Бинаризация по порогу, выбор области гистограммы
Самое просто преобразование - это бинаризация изображения по порогу. Для RGB изображения и изображения в градациях серого порогом является значение цвета. Встречаются идеальные задачи, в которых такого преобразования достаточно. Предположим, нужно автоматически выделить предметы на белом листе бумаги:

Выбор порога, по которому происходит бинаризация, во многом определяет процесс самой бинаризации. В данном случае, изображение было бинаризовано по среднему цвету. Обычно бинаризация осуществляется с помощью алгоритма, который адаптивно выбирает порог. Таким алгоритмом может быть выбор матожидания или моды . А можно выбрать наибольший пик гистограммы.

Бинаризация может дать очень интересные результаты при работе с гистограммами, в том числе в ситуации, если мы рассматриваем изображение не в RGB, а в HSV . Например, сегментировать интересующие цвета. На этом принципе можно построить как детектор метки так и детектор кожи человека.


Классическая фильтрация: Фурье, ФНЧ, ФВЧ
Классические методы фильтрации из радиолокации и обработки сигналов можно с успехом применять во множестве задач Pattern Recognition. Традиционным методом в радиолокации, который почти не используется в изображениях в чистом виде, является преобразование Фурье (конкретнее - БПФ). Одно из немногих исключение, при которых используется одномерное преобразование Фурье, - компрессия изображений . Для анализа изображений одномерного преобразования обычно не хватает, нужно использовать куда более ресурсоёмкое двумерное преобразование .
Мало кто его в действительности рассчитывает, обычно, куда быстрее и проще использовать свёртку интересующей области с уже готовым фильтром, заточенным на высокие (ФВЧ) или низкие(ФНЧ) частоты. Такой метод, конечно, не позволяет сделать анализ спектра, но в конкретной задаче видеообработки обычно нужен не анализ, а результат.


Самые простые примеры фильтров, реализующих подчёркивание низких частот (фильтр Гаусса) и высоких частот (Фильтр Габора).
Для каждой точки изображения выбирается окно и перемножается с фильтром того же размера. Результатом такой свёртки является новое значение точки. При реализации ФНЧ и ФВЧ получаются изображения такого типа:


Вейвлеты
Но что если использовать для свёртки с сигналом некую произвольную характеристическую функцию? Тогда это будет называться "Вейвлет-преобразование ". Это определение вейвлетов не является корректным, но традиционно сложилось, что во многих командах вейвлет-анализом называется поиск произвольного паттерна на изображении при помощи свёртки с моделью этого паттерна. Существует набор классических функций, используемых в вейвлет-анализе. К ним относятся вейвлет Хаара , вейвлет Морле , вейвлет мексиканская шляпа , и.т.д. Примитивы Хаара, про которые было несколько моих прошлых статей ( , ), относятся к таким функциям для двумерного пространства.



Выше приведено 4 примера классических вейвлетов. 3х-мерный вейвлет Хаара, 2х-мерные вейвлет Мейера, вейвлет Мексиканская Шляпа, вейвлет Добеши. Хорошим примером использования расширеной трактовки вейвлетов является задачка поиска блика в глазу, для которой вейвлетом является сам блик:

Классические вейвлеты обычно используются для , или для их классификации (будет описано ниже).
Корреляция
После такой вольной трактовки вейвлетов с моей стороны стоит упомянуть собственно корреляцию, лежащую в их основе. При фильтрации изображений это незаменимый инструмент. Классическое применение - корреляция видеопотока для нахождения сдвигов или оптических потоков. Простейший детектор сдвига - тоже в каком-то смысле разностный коррелятор. Там где изображения не коррелируют - было движение.


Фильтрации функций
Интересным классом фильтров является фильтрация функций. Это чисто математические фильтры, которые позволяют обнаружить простую математическую функцию на изображении (прямую, параболу, круг). Строится аккумулирующее изображение, в котором для каждой точки исходного изображения отрисовывается множество функций, её порождающих. Наиболее классическим преобразованием является преобразование Хафа для прямых. В этом преобразовании для каждой точки (x;y) отрисовывается множество точек (a;b) прямой y=ax+b, для которых верно равенство. Получаются красивые картинки:
(первый плюсег тому, кто первый найдёт подвох в картинке и таком определении и объяснит его, второй плюсег тому, кто первый скажет что тут изображено)
Преобразование Хафа позволяет находить любые параметризуемые функции. Например окружности . Есть модифицированное преобразование, которое позволяет искать любые . Это преобразование ужасно любят математики. Но вот при обработке изображений, оно, к сожалению, работает далеко не всегда. Очень медленная скорость работы, очень высокая чувствительность к качеству бинаризации. Даже в идеальных ситуациях я предпочитал обходиться другими методами.
Аналогом преобразования Хафа для прямых является преобразование Радона . Оно вычисляется через БПФ, что даёт выигрыш производительности в ситуации, когда точек очень много. К тому же его возможно применять к не бинаризованному изображению.
Фильтрации контуров
Отдельный класс фильтров - фильтрация границ и контуров . Контуры очень полезны, когда мы хотим перейти от работы с изображением к работе с объектами на этом изображении. Когда объект достаточно сложный, но хорошо выделяемый, то зачастую единственным способом работы с ним является выделение его контуров. Существует целый ряд алгоритмов, решающих задачу фильтрации контуров:Чаще всего используется именно Кэнни, который хорошо работает и реализация которого есть в OpenCV (Собель там тоже есть, но он хуже ищёт контуры).


Прочие фильтры
Сверху приведены фильтры, модификации которых помогают решить 80-90% задач. Но кроме них есть более редкие фильтры, используемые в локальных задачах. Таких фильтров десятки, я не буду приводить их все. Интересными являются итерационные фильтры (например ), а так же риджлет и курвлет преобразования, являющиеся сплавом классической вейвлет фильтрации и анализом в поле радон-преобразования. Бимлет-преобразование красиво работает на границе вейвлет преобразования и логического анализа, позволяя выделить контуры:
Но эти преобразования весьма специфичны и заточены под редкие задачи.
Часть 2. Логическая обработка результатов фильтрации
Фильтрация даёт набор пригодных для обработки данных. Но зачастую нельзя просто взять и использовать эти данные без их обработки. В этом разделе будет несколько классических методов, позволяющих перейти от изображения к свойствам объектов, или к самим объектам.Морфология
Переходом от фильтрации к логике, на мой взгляд, являются методы математической морфологии ( , ). По сути, это простейшие операции наращивания и эрозии бинарных изображений. Эти методы позволяют убрать шумы из бинарного изображения, увеличив или уменьшив имеющиеся элементы. На базе математической морфологии существуют алгоритмы оконтуривания, но обычно пользуются какими-то гибридными алгоритмами или алгоритмами в связке.
Контурный анализ
В разделе по фильтрации уже упоминались алгоритмы получения границ. Полученные границы достаточно просто преобразуются в контуры. Для алгоритма Кэнни это происходит автоматически, для остальных алгоритмов требуется дополнительная бинаризация. Получить контур для бинарного алгоритма можно например алгоритмом жука .Контур является уникальной характеристикой объекта. Часто это позволяет идентифицировать объект по контуру. Существует мощный математический аппарат, позволяющий это сделать. Аппарат называется контурным анализом ( , ).

Если честно, то у меня ни разу ни получилось применить контурный анализ в реальных задачах. Уж слишком идеальные условия требуются. То граница не найдётся, то шумов слишком много. Но, если нужно что-то распознавать в идеальных условиях - то контурный анализ замечательный вариант. Очень быстро работает, красивая математика и понятная логика.
Особые точки
Особые точки это уникальные характеристики объекта, которые позволяют сопоставлять объект сам с собой или с похожими классами объектов. Существует несколько десятков способов позволяющих выделить такие точки. Некоторые способы выделяют особые точки в соседних кадрах, некоторые через большой промежуток времени и при смене освещения, некоторые позволяют найти особые точки, которые остаются таковыми даже при поворотах объекта. Начнём с методов, позволяющих найти особые точки, которые не такие стабильные, зато быстро рассчитываются, а потом пойдём по возрастанию сложности:Первый класс. Особые точки, являющиеся стабильными на протяжении секунд. Такие точки служат для того, чтобы вести объект между соседними кадрами видео, или для сведения изображения с соседних камер. К таким точкам можно отнести локальные максимумы изображения, углы на изображении (лучший из детекторов, пожалуй, детектор Хариса), точки в которых достигается максимумы дисперсии, определённые градиенты и.т.д.
Второй класс. Особые точки, являющиеся стабильными при смене освещения и небольших движениях объекта. Такие точки служат в первую очередь для обучения и последующей классификации типов объектов. Например, классификатор пешехода или классификатор лица - это продукт системы, построенной именно на таких точках. Некоторые из ранее упомянутых вейвлетов могут являются базой для таких точек. Например, примитивы Хаара, поиск бликов, поиск прочих специфических функций. К таким точкам относятся точки, найденные методом гистограмм направленных градиентов (HOG).
Третий класс. Стабильные точки. Мне известно лишь про два метода, которые дают полную стабильность и про их модификации. Это и . Они позволяют находить особые точки даже при повороте изображения. Расчёт таких точек осуществляется дольше по сравнению с остальными методами, но достаточно ограниченное время. К сожалению эти методы запатентованы. Хотя, в России патентовать алгоритмы низя, так что для внутреннего рынка пользуйтесь.
Часть 3. Обучение
ретья часть рассказа будет посвящена методам, которые не работают непосредственно с изображением, но которые позволяют принимать решения. В основном это различные методы машинного обучения и принятия решений. Недавно Яндыкс выложил на Хабр по этой тематике, там очень хорошая подборка. Вот оно есть в текстовой версии. Для серьёзного занятия тематикой настоятельно рекомендую посмотреть именно их. Тут я попробую обозначить несколько основных методов используемых именно в распознавании образов.В 80% ситуаций суть обучения в задаче распознавания в следующем:
Имеется тестовая выборка, на которой есть несколько классов объектов. Пусть это будет наличие/отсутствие человека на фотографии. Для каждого изображения есть набор признаков, которые были выделены каким-нибудь признаком, будь то Хаар, HOG, SURF или какой-нибудь вейвлет. Алгоритм обучения должен построить такую модель, по которой он сумеет проанализировать новое изображение и принять решение, какой из объектов имеется на изображении.
Как это делается? Каждое из тестовых изображений - это точка в пространстве признаков. Её координаты это вес каждого из признаков на изображении. Пусть нашими признаками будут: «Наличие глаз», «Наличие носа», «Наличие двух рук», «Наличие ушей», и.т.д… Все эти признаки мы выделим существующими у нас детекторами, которые обучены на части тела, похожие на людские. Для человека в таком пространстве будет корректной точка . Для обезьяны точка для лошади . Классификатор обучается по выборке примеров. Но не на всех фотографиях выделились руки, на других нет глаз, а на третьей у обезьяны из-за ошибки классификатора появился человеческий нос. Обучаемый классификатор человека автоматически разбивает пространство признаков таким образом, чтобы сказать: если первый признак лежит в диапазоне 0.5




Существует очень много классификаторов. Каждый из них лучше работает в какой-то своей задачке. Задача подбора классификатора к конкретной задаче это во многом искусство. Вот немножко красивых картинок на тему.
Простой случай, одномерное разделение
Разберём на примере самый простой случай классификации, когда пространство признака одномерное, а нам нужно разделить 2 класса. Ситуация встречается чаще, чем может представиться: например, когда нужно отличить два сигнала, или сравнить паттерн с образцом. Пусть у нас есть обучающая выборка. При этом получается изображение, где по оси X будет мера похожести, а по оси Y -количество событий с такой мерой. Когда искомый объект похож на себя - получается левая гауссиана. Когда не похож - правая. Значение X=0.4 разделяет выборки так, что ошибочное решение минимизирует вероятность принятия любого неправильного решения. Именно поиском такого разделителя и является задача классификации.
Маленькая ремарка. Далеко не всегда оптимальным будет тот критерий, который минимизирует ошибку. Следующий график - это график реальной системы распознавания по радужной оболочке. Для такой системы критерий выбирается такой, чтобы минимизировать вероятность ложного пропуска постороннего человека на объект. Такая вероятность называется «ошибка первого рода», «вероятность ложной тревоги», «ложное срабатывание». В англоязычной литературе «False Access Rate ».
) АдаБуста - один из самых распространённых классификаторов. Например каскад Хаара построен именно на нём. Обычно используют когда нужна бинарная классификация, но ничего не мешает обучить на большее количество классов.
SVM ( , , , ) Один из самых мощных классификаторов, имеющий множество реализаций. В принципе, на задачах обучения, с которыми я сталкивался, он работал аналогично адабусте. Считается достаточно быстрым, но его обучение сложнее, чем у Адабусты и требуется выбор правильного ядра.
Ещё есть нейронные сети и регрессия. Но чтобы кратко их классифицировать и показать, чем они отличаются, нужна статья куда больше, чем эта.
________________________________________________
Надеюсь, у меня получилось сделать беглый обзор используемых методов без погружения в математику и описание. Может, кому-то это поможет. Хотя, конечно, статья неполна и нет ни слова ни о работе со стереоизображениями, ни о МНК с фильтром Калмана, ни об адаптивном байесовом подходе.
Если статья понравится, то попробую сделать вторую часть с подборкой примеров того, как решаются существующие задачки ImageRecognition.
И напоследок
Что почитать?1) Когда-то мне очень понравилась книга «Цифровая обработка изображений» Б. Яне, которая написана просто и понятно, но в то же время приведена почти вся математика. Хороша для того, чтобы ознакомиться с существующими методами.
2) Классикой жанра является Р Гонсалес, Р. Вудс " Цифровая обработка изображений ". Почему-то она мне далась сложнее, чем первая. Сильно меньше математики, зато больше методов и картинок.
3) «Обработка и анализ изображений в задачах машинного зрения» - написана на базе курса, читаемого на одной из кафедр ФизТеха. Очень много методов и их подробного описания. Но на мой взгляд в книге есть два больших минуса: книга сильно ориентирована на пакет софта, который к ней прилагается, в книге слишком часто описание простого метода превращается в математические дебри, из которых сложно вынести структурную схему метода. Зато авторы сделали удобный сайт, где представлено почти всё содержание - wiki.technicalvision.ru Добавить метки
- Tutorial
Давно хотел написать общую статью, содержащую в себе самые основы Image Recognition, некий гайд по базовым методам, рассказывающий, когда их применять, какие задачи они решают, что возможно сделать вечером на коленке, а о чём лучше и не думать, не имея команды человек в 20.
Какие-то статьи по Optical Recognition я пишу давненько, так что пару раз в месяц мне пишут различные люди с вопросами по этой тематике. Иногда создаётся ощущение, что живёшь с ними в разных мирах. С одной стороны понимаешь, что человек скорее всего профессионал в смежной теме, но в методах оптического распознавания знает очень мало. И самое обидное, что он пытается применить метод из близрасположенной области знаний, который логичен, но в Image Recognition полностью не работает, но не понимает этого и сильно обижается, если ему начать рассказывать что-нибудь с самых основ. А учитывая, что рассказывать с основ - много времени, которого часто нет, становится всё ещё печальнее.
Эта статья задумана для того, чтобы человек, который никогда не занимался методами распознавания изображений, смог в течении 10-15 минут создать у себя в голове некую базовую картину мира, соответствующую тематике, и понять в какую сторону ему копать. Многие методы, которые тут описаны, применимы к радиолокации и аудио-обработке.
Начну с пары принципов, которые мы всегда начинаем рассказывать потенциальному заказчику, или человеку, который хочет начать заниматься Optical Recognition:
- При решении задачи всегда идти от простейшего. Гораздо проще повесить на персону метку оранжевого цвета, чем следить за человеком, выделяя его каскадами. Гораздо проще взять камеру с большим разрешением, чем разрабатывать сверхразрешающий алгоритм.
- Строгая постановка задачи в методах оптического распознавания на порядки важнее, чем в задачах системного программирования: одно лишнее слово в ТЗ может добавить 50% работы.
- В задачах распознавания нет универсальных решений. Нельзя сделать алгоритм, который будет просто «распознавать любую надпись». Табличка на улице и лист текста - это принципиально разные объекты. Наверное, можно сделать общий алгоритм(вот хороший пример от гугла), но это будет требовать огромного труда большой команды и состоять из десятков различных подпрограмм.
- OpenCV - это библия, в которой есть множество методов, и с помощью которой можно решить 50% от объёма почти любой задачи, но OpenCV - это лишь малая часть того, что в реальности можно сделать. В одном исследовании в выводах было написано: «Задача не решается методами OpenCV, следовательно, она неразрешима». Старайтесь избегать такого, не лениться и трезво оценивать текущую задачу каждый раз с нуля, не используя OpenCV-шаблоны.
Список приведённых тут методов не полон. Предлагаю в комментариях добавлять критические методы, которые я не написал и приписывать каждому по 2-3 сопроводительных слова.
Часть 1. Фильтрация
В эту группу я поместил методы, которые позволяют выделить на изображениях интересующие области, без их анализа. Большая часть этих методов применяет какое-то единое преобразование ко всем точкам изображения. На уровне фильтрации анализ изображения не производится, но точки, которые проходят фильтрацию, можно рассматривать как области с особыми характеристиками.Бинаризация по порогу, выбор области гистограммы
Самое просто преобразование - это бинаризация изображения по порогу. Для RGB изображения и изображения в градациях серого порогом является значение цвета. Встречаются идеальные задачи, в которых такого преобразования достаточно. Предположим, нужно автоматически выделить предметы на белом листе бумаги:Выбор порога, по которому происходит бинаризация, во многом определяет процесс самой бинаризации. В данном случае, изображение было бинаризовано по среднему цвету. Обычно бинаризация осуществляется с помощью алгоритма, который адаптивно выбирает порог. Таким алгоритмом может быть выбор матожидания или моды . А можно выбрать наибольший пик гистограммы.
Бинаризация может дать очень интересные результаты при работе с гистограммами, в том числе в ситуации, если мы рассматриваем изображение не в RGB, а в HSV . Например, сегментировать интересующие цвета. На этом принципе можно построить как детектор метки так и детектор кожи человека.
Классическая фильтрация: Фурье, ФНЧ, ФВЧ
Классические методы фильтрации из радиолокации и обработки сигналов можно с успехом применять во множестве задач Pattern Recognition. Традиционным методом в радиолокации, который почти не используется в изображениях в чистом виде, является преобразование Фурье (конкретнее - БПФ). Одно из немногих исключение, при которых используется одномерное преобразование Фурье, - компрессия изображений . Для анализа изображений одномерного преобразования обычно не хватает, нужно использовать куда более ресурсоёмкое двумерное преобразование .Мало кто его в действительности рассчитывает, обычно, куда быстрее и проще использовать свёртку интересующей области с уже готовым фильтром, заточенным на высокие (ФВЧ) или низкие(ФНЧ) частоты. Такой метод, конечно, не позволяет сделать анализ спектра, но в конкретной задаче видеообработки обычно нужен не анализ, а результат.
Самые простые примеры фильтров, реализующих подчёркивание низких частот (фильтр Гаусса) и высоких частот (Фильтр Габора).
Для каждой точки изображения выбирается окно и перемножается с фильтром того же размера. Результатом такой свёртки является новое значение точки. При реализации ФНЧ и ФВЧ получаются изображения такого типа:
Вейвлеты
Но что если использовать для свёртки с сигналом некую произвольную характеристическую функцию? Тогда это будет называться "Вейвлет-преобразование ". Это определение вейвлетов не является корректным, но традиционно сложилось, что во многих командах вейвлет-анализом называется поиск произвольного паттерна на изображении при помощи свёртки с моделью этого паттерна. Существует набор классических функций, используемых в вейвлет-анализе. К ним относятся вейвлет Хаара , вейвлет Морле , вейвлет мексиканская шляпа , и.т.д. Примитивы Хаара, про которые было несколько моих прошлых статей ( , ), относятся к таким функциям для двумерного пространства.Выше приведено 4 примера классических вейвлетов. 3х-мерный вейвлет Хаара, 2х-мерные вейвлет Мейера, вейвлет Мексиканская Шляпа, вейвлет Добеши. Хорошим примером использования расширеной трактовки вейвлетов является задачка поиска блика в глазу, для которой вейвлетом является сам блик:
Классические вейвлеты обычно используются для сжатия изображений , или для их классификации (будет описано ниже).
Корреляция
После такой вольной трактовки вейвлетов с моей стороны стоит упомянуть собственно корреляцию, лежащую в их основе. При фильтрации изображений это незаменимый инструмент. Классическое применение - корреляция видеопотока для нахождения сдвигов или оптических потоков. Простейший детектор сдвига - тоже в каком-то смысле разностный коррелятор. Там где изображения не коррелируют - было движение.Фильтрации функций
Интересным классом фильтров является фильтрация функций. Это чисто математические фильтры, которые позволяют обнаружить простую математическую функцию на изображении (прямую, параболу, круг). Строится аккумулирующее изображение, в котором для каждой точки исходного изображения отрисовывается множество функций, её порождающих. Наиболее классическим преобразованием является преобразование Хафа для прямых. В этом преобразовании для каждой точки (x;y) отрисовывается множество точек (a;b) прямой y=ax+b, для которых верно равенство. Получаются красивые картинки:(первый плюсег тому, кто первый найдёт подвох в картинке и таком определении и объяснит его, второй плюсег тому, кто первый скажет что тут изображено)
Преобразование Хафа позволяет находить любые параметризуемые функции. Например окружности . Есть модифицированное преобразование, которое позволяет искать любые фигуры . Это преобразование ужасно любят математики. Но вот при обработке изображений, оно, к сожалению, работает далеко не всегда. Очень медленная скорость работы, очень высокая чувствительность к качеству бинаризации. Даже в идеальных ситуациях я предпочитал обходиться другими методами.
Аналогом преобразования Хафа для прямых является преобразование Радона . Оно вычисляется через БПФ, что даёт выигрыш производительности в ситуации, когда точек очень много. К тому же его возможно применять к не бинаризованному изображению.
Фильтрации контуров
Отдельный класс фильтров - фильтрация границ и контуров . Контуры очень полезны, когда мы хотим перейти от работы с изображением к работе с объектами на этом изображении. Когда объект достаточно сложный, но хорошо выделяемый, то зачастую единственным способом работы с ним является выделение его контуров. Существует целый ряд алгоритмов, решающих задачу фильтрации контуров:Чаще всего используется именно Кэнни, который хорошо работает и реализация которого есть в OpenCV (Собель там тоже есть, но он хуже ищёт контуры).
Прочие фильтры
Сверху приведены фильтры, модификации которых помогают решить 80-90% задач. Но кроме них есть более редкие фильтры, используемые в локальных задачах. Таких фильтров десятки, я не буду приводить их все. Интересными являются итерационные фильтры (например активная модель внешнего вида), а так же риджлет и курвлет преобразования, являющиеся сплавом классической вейвлет фильтрации и анализом в поле радон-преобразования. Бимлет-преобразование красиво работает на границе вейвлет преобразования и логического анализа, позволяя выделить контуры:Но эти преобразования весьма специфичны и заточены под редкие задачи.
Часть 2. Логическая обработка результатов фильтрации
Фильтрация даёт набор пригодных для обработки данных. Но зачастую нельзя просто взять и использовать эти данные без их обработки. В этом разделе будет несколько классических методов, позволяющих перейти от изображения к свойствам объектов, или к самим объектам.Морфология
Переходом от фильтрации к логике, на мой взгляд, являются методы математической морфологии ( , , ). По сути, это простейшие операции наращивания и эрозии бинарных изображений. Эти методы позволяют убрать шумы из бинарного изображения, увеличив или уменьшив имеющиеся элементы. На базе математической морфологии существуют алгоритмы оконтуривания, но обычно пользуются какими-то гибридными алгоритмами или алгоритмами в связке.Контурный анализ
В разделе по фильтрации уже упоминались алгоритмы получения границ. Полученные границы достаточно просто преобразуются в контуры. Для алгоритма Кэнни это происходит автоматически, для остальных алгоритмов требуется дополнительная бинаризация. Получить контур для бинарного алгоритма можно например алгоритмом жука .Контур является уникальной характеристикой объекта. Часто это позволяет идентифицировать объект по контуру. Существует мощный математический аппарат, позволяющий это сделать. Аппарат называется контурным анализом ( , ).
Если честно, то у меня ни разу ни получилось применить контурный анализ в реальных задачах. Уж слишком идеальные условия требуются. То граница не найдётся, то шумов слишком много. Но, если нужно что-то распознавать в идеальных условиях - то контурный анализ замечательный вариант. Очень быстро работает, красивая математика и понятная логика.
Особые точки
Особые точки это уникальные характеристики объекта, которые позволяют сопоставлять объект сам с собой или с похожими классами объектов. Существует несколько десятков способов позволяющих выделить такие точки. Некоторые способы выделяют особые точки в соседних кадрах, некоторые через большой промежуток времени и при смене освещения, некоторые позволяют найти особые точки, которые остаются таковыми даже при поворотах объекта. Начнём с методов, позволяющих найти особые точки, которые не такие стабильные, зато быстро рассчитываются, а потом пойдём по возрастанию сложности:Первый класс. Особые точки, являющиеся стабильными на протяжении секунд. Такие точки служат для того, чтобы вести объект между соседними кадрами видео, или для сведения изображения с соседних камер. К таким точкам можно отнести локальные максимумы изображения, углы на изображении (лучший из детекторов, пожалуй, детектор Хариса), точки в которых достигается максимумы дисперсии, определённые градиенты и.т.д.
Второй класс. Особые точки, являющиеся стабильными при смене освещения и небольших движениях объекта. Такие точки служат в первую очередь для обучения и последующей классификации типов объектов. Например, классификатор пешехода или классификатор лица - это продукт системы, построенной именно на таких точках. Некоторые из ранее упомянутых вейвлетов могут являются базой для таких точек. Например, примитивы Хаара, поиск бликов, поиск прочих специфических функций. К таким точкам относятся точки, найденные методом гистограмм направленных градиентов (HOG).
Третий класс. Стабильные точки. Мне известно лишь про два метода, которые дают полную стабильность и про их модификации. Это SURF и SIFT . Они позволяют находить особые точки даже при повороте изображения. Расчёт таких точек осуществляется дольше по сравнению с остальными методами, но достаточно ограниченное время. К сожалению эти методы запатентованы. Хотя, в России патентовать алгоритмы низя, так что для внутреннего рынка пользуйтесь.
Часть 3. Обучение
ретья часть рассказа будет посвящена методам, которые не работают непосредственно с изображением, но которые позволяют принимать решения. В основном это различные методы машинного обучения и принятия решений. Недавно Яндыкс выложил на Хабр курс по этой тематике, там очень хорошая подборка. Вот оно есть в текстовой версии. Для серьёзного занятия тематикой настоятельно рекомендую посмотреть именно их. Тут я попробую обозначить несколько основных методов используемых именно в распознавании образов.В 80% ситуаций суть обучения в задаче распознавания в следующем:
Имеется тестовая выборка, на которой есть несколько классов объектов. Пусть это будет наличие/отсутствие человека на фотографии. Для каждого изображения есть набор признаков, которые были выделены каким-нибудь признаком, будь то Хаар, HOG, SURF или какой-нибудь вейвлет. Алгоритм обучения должен построить такую модель, по которой он сумеет проанализировать новое изображение и принять решение, какой из объектов имеется на изображении.
Как это делается? Каждое из тестовых изображений - это точка в пространстве признаков. Её координаты это вес каждого из признаков на изображении. Пусть нашими признаками будут: «Наличие глаз», «Наличие носа», «Наличие двух рук», «Наличие ушей», и.т.д… Все эти признаки мы выделим существующими у нас детекторами, которые обучены на части тела, похожие на людские. Для человека в таком пространстве будет корректной точка . Для обезьяны точка для лошади . Классификатор обучается по выборке примеров. Но не на всех фотографиях выделились руки, на других нет глаз, а на третьей у обезьяны из-за ошибки классификатора появился человеческий нос. Обучаемый классификатор человека автоматически разбивает пространство признаков таким образом, чтобы сказать: если первый признак лежит в диапазоне 0.5
Существует очень много классификаторов. Каждый из них лучше работает в какой-то своей задачке. Задача подбора классификатора к конкретной задаче это во многом искусство. Вот немножко красивых картинок на тему.
Простой случай, одномерное разделение
Разберём на примере самый простой случай классификации, когда пространство признака одномерное, а нам нужно разделить 2 класса. Ситуация встречается чаще, чем может представиться: например, когда нужно отличить два сигнала, или сравнить паттерн с образцом. Пусть у нас есть обучающая выборка. При этом получается изображение, где по оси X будет мера похожести, а по оси Y -количество событий с такой мерой. Когда искомый объект похож на себя - получается левая гауссиана. Когда не похож - правая. Значение X=0.4 разделяет выборки так, что ошибочное решение минимизирует вероятность принятия любого неправильного решения. Именно поиском такого разделителя и является задача классификации.Маленькая ремарка. Далеко не всегда оптимальным будет тот критерий, который минимизирует ошибку. Следующий график - это график реальной системы распознавания по радужной оболочке. Для такой системы критерий выбирается такой, чтобы минимизировать вероятность ложного пропуска постороннего человека на объект. Такая вероятность называется «ошибка первого рода», «вероятность ложной тревоги», «ложное срабатывание». В англоязычной литературе «False Access Rate ».
) АдаБуста - один из самых распространённых классификаторов. Например каскад Хаара построен именно на нём. Обычно используют когда нужна бинарная классификация, но ничего не мешает обучить на большее количество классов.
SVM ( , , , ) Один из самых мощных классификаторов, имеющий множество реализаций. В принципе, на задачах обучения, с которыми я сталкивался, он работал аналогично адабусте. Считается достаточно быстрым, но его обучение сложнее, чем у Адабусты и требуется выбор правильного ядра.
Ещё есть нейронные сети и регрессия. Но чтобы кратко их классифицировать и показать, чем они отличаются, нужна статья куда больше, чем эта.
________________________________________________
Надеюсь, у меня получилось сделать беглый обзор используемых методов без погружения в математику и описание. Может, кому-то это поможет. Хотя, конечно, статья неполна и нет ни слова ни о работе со стереоизображениями, ни о МНК с фильтром Калмана, ни об адаптивном байесовом подходе.
Если статья понравится, то попробую сделать вторую часть с подборкой примеров того, как решаются существующие задачки ImageRecognition.
И напоследок
Что почитать?1) Когда-то мне очень понравилась книга «Цифровая обработка изображений» Б. Яне, которая написана просто и понятно, но в то же время приведена почти вся математика. Хороша для того, чтобы ознакомиться с существующими методами.
2) Классикой жанра является Р Гонсалес, Р. Вудс " Цифровая обработка изображений ". Почему-то она мне далась сложнее, чем первая. Сильно меньше математики, зато больше методов и картинок.
3) «Обработка и анализ изображений в задачах машинного зрения» - написана на базе курса, читаемого на одной из кафедр ФизТеха. Очень много методов и их подробного описания. Но на мой взгляд в книге есть два больших минуса: книга сильно ориентирована на пакет софта, который к ней прилагается, в книге слишком часто описание простого метода превращается в математические дебри, из которых сложно вынести структурную схему метода. Зато авторы сделали удобный сайт, где представлено почти всё содержание - wiki.technicalvision.ru Добавить метки
Как тема исследований искусственного интеллекта распознавание изображений имеет давнюю историю и большое практическое значение. Впервые оно было использовано для машинного считывания рукописных цифр. В настоящее время область его применения существенно расширилась: начиная от измерений, контроля, сортировки и сборки в производственных процессах и кончая анализом изображений, считываемых на расстоянии, диагностикой по медицинским снимкам, количественной оценкой экспериментальных данных, идентификацией человека, автоматическим проектированием, пониманием изображений как функции технического зрения роботов и т.д. Процесс распознавания изображения человеком - не простая обработка зрительной информации, а сложный процесс, важную роль в котором играют психологические факторы. В частности, в процессе понимания изображения присутствует семантический вывод, однако для его реализации требуются сбор обширных знаний и интуитивные решения, выходящие за рамки логики, поэтому смоделировать такой процесс в компьютере чрезвычайно сложно.
В существующих средствах распознавания изображений используют различные методы в зависимости от того, является ли объект распознавания искусственным или естественным. В первом случае обычно имеют дело с отдельными предметами четкой формы, поэтому большое число исследований
посвящено сопоставлению образов путем обнаружения контуров и границ либо выводу трехмерной формы с использованием геометрических правил. Среди естественных объектов много объектов неправильной формы со светотенями, поэтому обычно с помощью кластерного анализа выполняют разбиение на однородные области, а затем по особенностям форм этих областей делают заключение об объекте. Кроме того, в последнее время проводится много исследований по воспроизведению двух- и трехмерных форм объектов на основе обработки большого числа изображений. В робототехнике возникает необходимость обработки подвижных изображений в реальном времени, т. е. большое значение приобретает скорость распознавания.
В общем случае процесс распознавания изображений с помощью компьютера заключается в следующем.
1. Получение с помощью камеры или другим способом информации об изображении и преобразование ее в цифровую информацию: в результате кадры делятся на большое число элементов, и каждому элементу приписывается цвет и контрастность.
2. Предварительная обработка. Удаление шумов, нормализация для сравнения с эталоном, сегментация (выделение локальной информации, необходимой для распознавания) и т. п.
3. Выделение признаков. Признаки изображения могут иметь различные уровни. Строго говоря, сегментация также является частью выделения признаков. Методы выделения признаков могут быть локальными и глобальными. Примером локального метода является обнаружение границ, глобального-кластеризация и метод расширения областей. Для обнаружения границ используются неоднородности между областями, в то время как кластеризация - это сегментация на основе обнаружения однородных областей. Поскольку в любом случае в информации об изображении содержится шум, не устраненный на этапе предварительной обработки, при сегментации необходима обработка нечеткой информации. Глобальное выделение признаков осуществляется по отношению к форме, свойствам, относительному положению и другим характеристикам выделенных областей. Эта процедура имеет большое значение для последующего этапа оценки.
4. Понимание и оценка. Процессом понимания изображения
называют либо классификацию и отождествление путем сравнения полученных кластеров с известными моделями, либо построение трехмерного изображения исходного объекта с помощью выводов. Результат этого процесса является заключительной целью распознавания изображений.
В настоящее время проведено огромное число исследований процесса распознавания изображений, но результаты пока крайне неудовлетворительны. Например, практически не затрагивались такие вопросы, как понимание сложных изображений, взаимное преобразование словесной и видеоинформации, распознавание предметов криволинейных и неправильных форм, распознавание размытых изображений, высокоэффективное выделение признаков, семантический вывод и воображение и т. п.
Основными методологическими подходами, принятыми в настоящее время в распознавании, являются статистика, кластерный анализ, дедукция в двузначной логике и ряд других, однако все они весьма далеки от того процесса распознавания, который свойствен человеку. Выделение признаков - наиболее важный этап в распознавании изображения, но и исключительно сложный. Действительно, что такое признак изображения? Почему карикатура обладает бблыиим сходством с человеком, чем его фотография? По-видимому, важную роль в процессе распознавания человеком играет информация, которая для компьютера представляется не более чем шумом, но она каким-то образом выделяется и представляется. Выявить признаки такого рода можно чувствами человека, а не логикой. Кроме того, при распознавании размытых изображений работают скорее не аналитические способности, а способности к обобщению, т.е. это также интуитивный процесс. Для имитации таких процессов необходимы исследования методов обработки субъективной информации и приемов обращения с макроинформацией. Исследования по нечеткому распознаванию изображений еще только начинаются, но уже сейчас ожидают дальнейшего развития новой методологии, отвечающей изложенным выше требованиям.
Рассмотрим кратко состояние нечеткого распознавания изображений. Поскольку видеоинформация даже достаточно четкого объекта может нарушаться за счет шумов, для обнаружения контуров чаще всего применяется нечеткая логика. Типичным примером является классификация
элементов изображения с помощью нечеткой кластеризации. Однако, поскольку абсолютно идентичные элементы встречаются редко, необходима «размытая» кластеризация. Аналогичные методы применяются и при классификации образов, имеющих разброс относительно эталонного образа (распознавание рукописных знаков, речи и т. п.).
При непосредственном обнаружении контуров возникает проблема шумов, не решаемая до конца с помощью фильтров. Кроме того, необходимы выводы для восполнения утраченных участков. Для этого применяют эвристические правила, имеющие, однако, нечеткий качественный характер. При переходе к этапу понимания изображения возникает проблема более эффективного нечеткого сопоставления образов, требующая для своего решения сопоставления не только по форме, но и по семантике. В частности, такая ситуация складывается в области диагностики по рентгеновским снимкам, где формирование правил невозможно.
Ниже приводится несколько типичных примеров исследований по распознаванию изображений с использованием нечеткой логики.
Я продолжаю серию статей посвящённую тематике pattern recognition, computer vision и machine learning. Сегодня я вам представляю обзор алгоритма, который носит название eigenface.
В основе алгоритма лежит использование фундаментальных статистических характеристик: средних (мат. ожидание) и ковариационной матрицы ; использование метода главных компонент . Мы также коснёмся таких понятий линейной алгебры, как собственные значения (eigenvalues) и собственные вектора (eigenvectors) (wiki: , eng). И вдобавок, поработаем в многомерном пространстве.
Как бы страшно всё это не звучало, данный алгоритм, пожалуй, является одним из самых простых рассмотренных мною, его реализация не превышает нескольких десятков строк, в тоже время он показывает неплохие результаты в ряде задач.
Для меня eigenface интересен поскольку последние 1.5 года я занимаюсь разработкой, в том числе, статистических алгоритмов обработки различных массивов данных, где очень часто приходится иметь дело со всеми вышеописанными «штуками».
Инструментарий
По сложившейся, в рамках моего скромного опыта, методике, после обдумывания какого-либо алгоритма, но перед его реализацией на С/С++/С#/Python etc., необходимо быстро (насколько это возможно) создать математическую модель и опробовать её, что-нибудь посчитать. Это позволяет внести необходимые коррективы, исправить ошибки, обнаружить то, что не было учтено при размышлении над алгоритмом. Для этого всего я использую MathCAD . Преимущество MathCAD в том, что наряду с огромным количеством встроенных функций и процедур, в нём используется классическая математическая нотация. Грубо говоря, достаточно знать математику и уметь писать формулы.

Краткое описание алгоритма
Как и любой алгоритм из серии machine learning, eigenface необходимо сначала обучить, для этого используется обучающая выборка (training set), представляющая собой изображения лиц, которые мы хотим распознать. После того как модель обучена, мы подадим на вход некоторое изображение и в результате получим ответ на вопрос: какому изображению из обучающей выборки с наибольшей вероятностью соответствует пример на входе, либо не соответствует никакому.
Задача алгоритма представить изображение как сумму базисных компонент (изображений):
Где Ф i – центрированное (т.е. за вычетом среднего) i-ое изображение исходной выборки, w j представляют собой веса и u j собственные вектора (eigenvectors или, в рамках данного алгоритма, eigenfaces).

На рисунке выше мы получаем исходное изображение взвешенным суммированием собственных векторов и прибавлением среднего. Т.е. имея w и u, мы можем восстановить любое исходное изображение.
Обучающую выборку необходимо спроецировать в новое пространство (причём пространство, как правило, гораздо больше размерности, чем исходное 2х мерное изображение), где каждая размерность будет давать определённый вклад в общее представление. Метод главных компонент позволяет найти базис нового пространство таким образом, чтобы данные в нём располагались, в некотором смысле, оптимально. Чтобы понять, просто представьте, что в новом пространстве некоторые размерности (aka главные компоненты или собственные вектора или eigenfaces) будут «нести» больше общей информации, тогда как другие будут нести только специфичную информацию. Как правило, размерности более высокого порядка (отвечающие меньшим собственным значениям) несут гораздо меньше полезной (в нашем случае под полезной понимается нечто, что даёт обобщённое представление о всей выборке) информации, чем первые размерности, соответствующие наибольшим собственным значениям. Оставляя размерности только с полезной информацией, мы получаем пространство признаков, в котором каждое изображение исходной выборки представлено в обобщённом виде. В этом, очень упрощённо, и состоит идея алгоритма.
Далее, имея на руках некоторое изображение, мы можем отобразить его на созданное заранее пространство и определить к какому изображению обучающей выборки наш пример расположен ближе всего. Если он находится на относительно большом расстоянии от всех данных, то это изображение с большое вероятностью вообще не принадлежит нашей базе.
За более подробным описанием я советую обращаться к списку External links википедии.
Небольшое отступление. Метод главных компонент имеет достаточно широкое применение. Например, в своей работе я его использую для выделения в массиве данных компонент определённого масштаба (временного или пространственного), направления или частоты. Он может быть использован как метод для сжатия данных или метод уменьшения исходной размерности многомерной выборки.
Создание модели
Для составления обучающей выборки использовалась Olivetti Research Lab"s (ORL) Face Database . Там имеются по 10 фотографий 40 различных людей:
Для описания реализации алгоритма я буду вставлять сюда скриншоты с функциями и выражениями из MathCAD и комментировать их. Поехали.

FaceNums задаёт вектор номеров лиц, которые будут использоваться в обучении. varNums задаёт номер варианта (согласно описанию базы у нас 40 директорий в каждой по 10 файлов изображений одного и того же лица). Наша обучающая выборка состоит из 4х изображений.
Далее мы вызываем функцию ReadData. В ней реализуется последовательное чтение данных и перевод изображения в вектор (функция TwoD2OneD):

Таким образом на выходе имеем матрицу Г каждый столбец которой является «развёрнутым» в вектор изображением. Такой вектор можно рассматривать как точку в многомерном пространстве, где размерность определяется количеством пикселей. В нашем случае изображения размером 92х112 дают вектор из 10304 элементов или задают точку в 10304-мерном пространстве.

2. Необходимо нормализовать все изображения в обучающей выборке, отняв среднее изображение. Это делается для того, чтобы оставить только уникальную информацию, убрав общие для всех изображений элементы.

Функция AverageImg считает и возвращает вектор средних. Если мы этот вектор «свернём» в изображение, то увидим «усреднённое лицо»:

Функция Normalize вычитает вектор средних из каждого изображения и возвращает усреднённую выборку:

3. Следующий шаг это вычисление собственных векторов (они же eigenfaces) u и весов w для каждого изображения в обучающей выборке. Другими словами, это переход в новое пространство.

Вычисляем ковариационную матрицу, потом находим главные компоненты (они же собственные вектора) и считаем веса. Те, кто познакомятся с алгоритмом ближе, въедут в математику. Функция возвращает матрицу весов, собственные вектора и собственные значения. Это все необходимые для отображения в новое пространство данные. В нашем случае, мы работаем с 4х мерным пространством, по числу элементов в обучающей выборке, остальные 10304 - 4 = 10300 размерности вырождены, мы их не учитываем.
Собственные значения нам, в целом, не нужны, но по ним можно проследить кое-какую полезную информацию. Давайте взглянем на них:

Собственные значения на самом деле показывают дисперсию по каждой из осей главных компонент (каждой компоненте соответствует одна размерность в пространстве). Посмотрите на правое выражение, сумма данного вектора = 1, а каждый элемент показывает вклад в общую дисперсию данных. Мы видим, что 1 и 3 главные компоненты дают в сумме 0.82. Т.е. 1 и 3 размерности содержат 82% всей информации. 2ая размерность свёрнута, а 4ая несёт 18% информации и нам она не нужна.
Распознавание
Модель составлена. Будем тестировать.

Мы создаём новую выборку из 24 элементов. Первые 4ре элемента те же, что и в обучающей выборке. Остальные это разные варианты изображений из обучающей выборки:

Далее загружаем данные и передаём в процедуру Recognize. В ней каждое изображение усредняется, отображается в пространство главных компонент, находятся веса w. После того как вектор w известен необходимо определить к какому из существующих объектов он ближе всего расположен. Для этого используется функция dist (вместо классического евклидова расстояния в задачах распознавания образов лучше применять другую метрику: расстояние Махалонобиса). Находится минимальное расстояние и индекс объекта к которому данное изображение расположено ближе всего.
На выборке из 24 показанных выше объектов эффективность классификатора 100%. Но есть один ньюанс. Если мы подадим на вход изображение, которого нет в исходной базе, то всё равно будет вычислен вектор w и найдено минимальное расстояние. Поэтому вводится критерий O, если минимальное расстояние < O значит изображение принадлежит к классу распознаваемых, если минимальное расстояние > O, то такого изображения в базе нет. Величина данного критерия выбирается эмпирически. Для данной модели я выбрал O = 2.2.
Давайте составим выборку из лиц, которых нет в обучающей и посмотрим насколько эффективно классификатор отсеет ложные образцы.

Из 24 образцов имеем 4 ложных срабатывания. Т.е. эффективность составила 83%.
Заключение
В целом простой и оригинальный алгоритм. В очередной раз доказывает, что в пространствах большей размерности «скрыто» множество полезной информации, которая может быть использована различным образом. Вкупе с другими продвинутыми методиками eigenface может применятся с целью повышения эффективности решения поставленных задач.
Например, у нас в качестве классификатора применяется простой distance classifier. Однако мы могли бы применить более совершенный алгоритм классификации, например
Аннотация: В лекции рассматриваются характеристики задач распознавания образов и их типы, основы теории анализа и распознавания изображений (признаковый метод), распознавание по методу аналогий. Среди множества интересных задач по распознаванию рассмотрены принципы и подход к распознаванию в задачах машинного чтения печатных и рукописных текстов.
Современные роботы, снабженные телевизионными камерами, способны достаточно хорошо видеть, чтобы работать с реальным миром. Они могут делать заключения о том, какого типа объекты присутствуют, в каких они находятся отношениях между собой, какие группы образуют, какой текст содержат и т. д. Однако сложные задачи распознавания, например, распознавание похожих трехмерных быстродвижущихся объектов или неразборчивого рукописного текста требуют совершенствования методов и средств для своего решения. В этой лекции мы рассмотрим основы некоторых традиционных методов распознавания. Наше рассмотрение мы начнем с наиболее часто применяемого признакового метода распознавания [ 1.4 ] , [ 4.1 ] .
Общая характеристика задач распознавания образов и их типы.
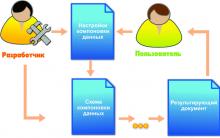
Под образом понимается структурированное описание изучаемого объекта или явления, представленное вектором признаков , каждый элемент которого представляет числовое значение одного из признаков , характеризующих соответствующий объект . Общая структура системы распознавания и этапы в процессе ее разработки показаны на рис. 4.1 .
Рис.
4.1.
Суть задачи распознавания - установить, обладают ли изучаемые объекты фиксированным конечным набором признаков , позволяющим отнести их к определенному классу.
Задачи распознавания имеют следующие характерные черты .
- Это информационные задачи , состоящие из двух этапов: а) приведение исходных данных к виду, удобному для распознавания ; б) собственно распознавание (указание принадлежности объекта определенному классу).
- В этих задачах можно вводить понятие аналогии или подобия объектов и формулировать понятие близости объектов в качестве основания для зачисления объектов в один и тот же класс или разные классы.
- В этих задачах можно оперировать набором прецедентов-примеров , классификация которых известна и которые в виде формализованных описаний могут быть предъявлены алгоритму распознавания для настройки на задачу в процессе обучения.
- Для этих задач трудно строить формальные теории и применять классические математические методы (часто недоступна информация для точной математической модели или выигрыш от использования модели и математических методов не соизмерим с затратами).
- В этих задачах возможна "плохая" информация (информация с пропусками, разнородная, косвенная, нечеткая, неоднозначная, вероятностная).
Целесообразно выделить следующие типы задач распознавания .
- Задача распознавания - отнесение предъявленного объекта по его описанию к одному из заданных классов ( обучение с учителем ).
- Задача автоматической классификации - разбиение множества объектов (ситуаций) по их описаниям на систему непересекающихся классов ( таксономия , кластерный анализ , обучение без учителя).
- Задача выбора информативного набора признаков при распознавании .
- Задача приведения исходных данных к виду, удобному для распознавания .
- Динамическое распознавание и динамическая классификация - задачи 1 и 2 для динамических объектов.
- Задача прогнозирования - это задачи 5, в которых решение должно относиться к некоторому моменту в будущем.
Основы теории анализа и распознавания изображений.
Пусть дано множество M объектов ; на этом множестве существует разбиение на конечное число подмножеств (классов) i = {1,m} , Объекты задаются значениями некоторых признаков x j , j= {1,N}. Описание объекта называют стандартным, если принимает значение из множества допустимых значений.
Пусть задана таблица обучения
(
таблица
4.1). Задача распознавания
состоит в том, чтобы для заданного
объекта и набора классов , ..., по обучающей
информации в таблице обучения
![]() о классах и описанию вычислить предикаты:
о классах и описанию вычислить предикаты:
где i= {1,m}, - неизвестно.
| Объект | Признаки и их значения | Класс | ||
|---|---|---|---|---|
| x 1 | x j | x n | ||
| ... | ||||
| r11 | ||||
| ... | ||||
| ... | ||||
Рассмотрим алгоритмы распознавания , основанные на вычислении оценок. В их основе лежит принцип прецедентности (в аналогичных ситуациях следует действовать аналогично).
Пусть задан полный набор признаков x 1 , ..., x N . Выделим систему подмножеств множества признаков S 1 , ..., S k . Удалим произвольный набор признаков из строк , , ..., и обозначим полученные строки через , , ..., , .
Правило близости, позволяющее оценить похожесть строк и состоит в следующем. Пусть "усеченные" строки содержат q первых символов, то есть и Заданы пороги ... , Строки и считаются похожими, если выполняется не менее чем неравенств вида
Величины ... , входят в качестве параметров в модель класса алгоритмов на основе оценок.
Пусть - оценка объекта по классу .
Описания объектов , предъявленные для распознавания , переводятся в числовую матрицу оценок. Решение о том, к какому классу отнести объект , выносится на основе вычисления степени сходства распознавания объекта (строки) со строками, принадлежность которых к заданным классам известна.
Проиллюстрируем описанный алгоритм распознавания на примере. Задано 10 классов объектов (рис. 4.2а). Требуется определить признаки таблицы обучения , пороги и построить оценки близости для классов объектов, показанных на рис. 4.2б . Предлагаются следующие признаки таблицы обучения :
x 1 - количество вертикальных линий минимального размера;







Обзор Samsung Galaxy A7 (2017): не боится воды и экономии Стоит ли покупать samsung a7
Делаем бэкап прошивки на андроиде
Как настроить файл подкачки?
Установка режима совместимости в Windows
Резервное копирование и восстановление драйверов Windows