Untuk membongkar servo kami, kami memerlukan pemutar skru. Kerana Saya membongkar servo yang sangat kecil, maka pemutar skru yang sesuai diperlukan. Saya sendiri menggunakan pemutar skru dari beberapa set Cina yang murah. Saya membelinya di kios di jalan bawah dengan harga sekitar $ 5, jadi ia tidak terlalu mahal.
Untuk membuka servo, anda hanya perlu melepaskan empat skru. Mereka terletak di penutup bawah. Buka penutup:

Setelah menanggalkan penutup, anda dapat melihat unit kawalan. Saya tidak akan memperincikannya, bagaimanapun saya akan menghapusnya dari sini. Sebuah motor juga kelihatan di mana dua wayar mengarah.

Terdapat juga penutup di bahagian atas, yang mana anda dapat melihat gear pengurang. Perlu diperhatikan bahawa dua daripadanya terpaku pada potensiometer - ini cukup penting, kerana agar kotak gear terus menjalankan fungsinya, kita harus benar-benar mematahkan potensiometer - kita hanya akan menggunakannya sebagai paksi untuk roda gigi.

Sebenarnya, perlu mengeluarkan semua gear dari servo dan membuangnya sebentar. Kami mengeluarkan potensiometer (omong-omong, ia adalah perintang yang berubah-ubah) dari casing dengan menolaknya dengan lembut dari bahagian bawah servo dengan pemutar skru.

Ini adalah titik untuk tidak kembali. Sudah tentu, selalu dapat menyelesaikan semuanya, tetapi ini sudah lebih sukar. Jadi - menggigit potensiometer.

Kemudian, dengan cara yang sama, kami memisahkan papan kawalan dengan wayar kuasa dan isyarat.

Kemudian kami menggigit wayar dari motor. Di sini, berhati-hati untuk tidak menggigit kenalan dari motor itu sendiri - jika anda tidak pasti, lebih baik meninggalkan wayar dengan margin. Kemudian ia dapat disejat. Saya menggigit wayar ke bahagian yang sangat sesuai.


Mari buat persediaan.

Segala-galanya kelihatan seperti di tempatnya. Sekarang kita menggunakan potensiometer kita.

Faktanya ialah sekarang ia juga hanya berputar pada sudut tertentu. Oleh kerana ia adalah paksi dan roda gigi terbesar terpasang padanya, di mana kita akan benar-benar memasang roda pada masa akan datang, kita perlu membuatnya supaya ia sentiasa berputar. Kami mengeluarkan dua plat logam yang mencegahnya. Kita mendapatkan:

Saya harap gambar itu menunjukkan apa yang saya buat. Saya merobeknya dengan tang kecil, kerana tidak ada yang lebih sesuai di tangan.
Sekarang anda perlu memotong limiter pada gear itu sendiri. Ia kelihatan seperti penonjolan dari bahagian bawah gear. Sangat mudah untuk mencarinya, ia kelihatan seperti ini.

Kami memotong.

Dan selepas itu, anda boleh mula memasang kotak gear kembali ke perumahan. Kami meletakkan kembali paksi yang kami buat lebih awal dari potensiometer.

Selanjutnya, satu demi satu roda gigi, bermula dengan yang paling kecil. Berhati-hati semasa memasukkan gear terakhir - ia dipasang khas pada paksi bekas potensiometer, kerana hujung paksi dibuat dalam bentuk huruf D... Penting untuk penonjolan ini jatuh ke dalam ceruk gigi. Ternyata sesuatu yang serupa dengan gambar berikut.

Kami meletakkan penutup atas pada kotak gear supaya tidak hancur semasa kerja selanjutnya.

Tidak banyak yang tinggal. Kami mengambil wayar dengan penyambung yang sebelumnya kami terlepas dari papan dan memisahkan pendawaian di dalamnya. Tidak layak dibahagi jauh, sebenarnya satu sentimeter sudah cukup.

Kami membersihkan dua daripadanya (pada dasarnya ada, tetapi saya menggunakan warna merah dan hijau). Cukup untuk memotong penebat sekitar 3mm. Untuk tujuan kami - lebih daripada.

Kami hanya membengkokkan wayar yang tidak dilucutkan yang tinggal sehingga tidak mengganggu kami.

Mari beralih ke yang panas. Sudah tiba masanya untuk memanaskan besi pematerian. Semasa besi pematerian memanas, saya membuat servo lebih selesa dalam genggaman.


Langkah pertama adalah membuang sisa-sisa pateri lama yang tersisa pada kenalan enjin. Saya melakukan ini dengan menggunakan pam pematrian, memanaskan hubungan dengan besi pematerian ke keadaan sehingga solder mencair. Perkara utama di sini adalah tidak keterlaluan - penutup belakang motor masih plastik dan tidak suka berjemur dalam jangka masa yang lama. Prosesnya kelihatan seperti ini:


Saya faham bahawa mungkin dan tidak begitu ketara apa yang saya lakukan, tetapi hampir tidak ada solder yang tersisa pada kenalan, itulah yang saya mahukan.

Terdapat banyak artikel mengenai pematerian dalam DI HALT "a. Dia pada umumnya seorang yang genius, seperti yang saya kira. Pautan ke blognya, ada banyak perkara selain pematerian, sebenarnya, hanya mencari.
Pendek kata, untuk membuat solder yang baik, anda mesti selalu membuang solder lama terlebih dahulu.
Masih terpateri dua wayar. Mereka yang biasa dengan pematerian boleh melakukannya dalam 5 saat. Seseorang seperti saya, untuk kali kedua dalam hidup saya, biasanya menggunakan besi pematerian, ia memerlukan sedikit masa lagi, tetapi tetap - sangat mudah, semua orang boleh melakukan ini.
Semasa pematerian, saya menggunakan fluks, yang, tentu saja, menjadikan kerja lebih mudah dan kualiti pematerian dengannya lebih mudah untuk dipastikan. Secara peribadi, atas nasihat, sekali lagi, DI HALT "dan di blognya, saya telah berjaya jatuh cinta dengan LTI-120. Saya memilikinya dalam balang bergaya dengan segera dengan berus.

Kami mengetatkan empat skru.

Itu sahaja, kerja semula servo sudah selesai. Setelah memasang kembali servo dengan lebih selesa dan lebih kuat dalam genggaman, anda boleh memulakan ujian.

Kali ini saya tidak akan bermain-main dengan alat kawalan, tetapi hanya membekalkan voltan dari bekalan kuasa 5V ke wayar hijau dan merah. Perhatian, video mempunyai bunyi yang cukup kuat dari pemacu.
Seperti yang anda lihat, kini tidak ada yang menghalang servo kita berputar tanpa berhenti. Suara yang dihasilkan oleh pemacu sebenarnya tidak sunyi, tetapi pada prinsipnya ia boleh diterima. Itu mungkin semua untuk hari ini.
Servo biasanya mempunyai sudut putaran terhad 180 darjah. Dalam kes ini, pertimbangkan servo "diubah" dengan sudut putaran paksi tanpa had. 
TTX dari halaman penjual
Saiz: 40 * 20 * 37.5 + 5mm aci pemacu
berat: 38g
panjang wayar: 320 mm
Kelajuan: 0.19sec / 60 darjah (4.8V)
0.22sec / 60 darjah (6V)
kelajuannya mungkin keliru, dengan 6 volt servo harus lebih cepat
tork: 5kg. cm pada (4.8V)
5.5kg.cm.at (6V)
voltan: 4.8V-6V
Set penghantaran standard 
4 rocker dengan pelbagai bentuk
4 bushings, 4 peredam getah dan 4 skru untuk memasang servo
dan satu lagi skru kecil untuk memasang rocker ke batang melarikan diri dari foto :)
Penampilannya memberi inspirasi pada keyakinan, tidak ada yang menyentuh, tali kecil yang dicetak hanya di bahagian telinga yang diikat, pelekat dilekatkan sedikit bengkok (tautologi ya!). Kawatnya lembut, penyambungnya dipasang dengan baik pada pin. 
Nah, sekarang autopsi:
Siapa yang tidak tahu cara kerjanya: sekiranya terdapat motor, papan kawalan dan perintang yang berubah-ubah mengikut kedudukan yang mana servo menentukan sudut paksi.
Kotak gear dalam servo ini adalah plastik, sumbernya lebih kecil daripada logam dan tidak menyukai beban besar. Bushing untuk gandar pusat diperbuat daripada tembaga atau sebahagian aloi. Terdapat galas pada poros keluaran. Gris boleh ditambah 
Bahagian elektrik 

Otak yang mengawal arah dan kelajuan putaran, perintang berubah-ubah dan motor elektrik.
Dan sekarang, perhatian, "hack hidup", bagaimana membuat servo dari servo biasa, servo putaran berterusan 
Pada asalnya, pemboleh ubah tersangkut dengan paksinya ke poros keluaran dari bahagian dalam servo, di poros yang diubah sepertinya telah digigit / diputuskan pada tahap pemasangan, perintang diatur ke posisi tengah sehingga poros tidak berputar pada keadaan rehat. Sekiranya anda melangkah lebih jauh, anda boleh membuangnya sepenuhnya dan menggantinya dengan 2 perintang tetap yang serupa, lebih senang meletakkan sesuatu smd-shnoe di papan kawalan.
Jumlah:
servo sebagai serva, bukan ruang, tetapi bukan barang pengguna,
boleh didapati lebih murah dan dengan gear logam
Ps
Seperti yang anda nyatakan dengan betul dalam komen, saya lupa untuk menyebut bagaimana servo dikendalikan, servo dikuasakan oleh 5-6 volt dan isyarat ppm melalui wayar ketiga.
Pilihan kawalan yang paling biasa adalah:
1) kami menyambungkan bekalan kuasa di satu sisi, di sisi lain, output untuk 3 "pengguna" (servos, motor, dll.) Bekalan kuasa dan isyarat PPM, kenop dapat digunakan untuk menyesuaikan kelajuan dan arah putaran servo
2) Peralatan RC pada output penerima adalah isyarat ppm yang sama.
3) mengarahkan arduinka
Video
Pps
Akibat "pengubahsuaian" servo telah kehilangan maklum balas, otak tidak mengetahui kedudukan sebenar poros dan arah putarannya, pertimbangkan saat ini jika anda akan membelinya.
Robot paling mudah adalah roda dua atau roda 4. Asas robot seperti itu boleh menjadi casis dari kereta yang dikendalikan radio, tetapi tidak semua orang memilikinya atau sangat menyesal untuk menghisapnya. Anda juga boleh membuat casis sendiri, tetapi meletakkan roda pada garis lurus pada motor bukanlah penyelesaian yang sangat baik, anda perlu memperlahankan motor dengan bayaran, kerana ini anda memerlukan kotak gear. Mendapatkan casis atau kotak gear siap pakai, atau motor dengan kotak gear ternyata bukan tugas yang mudah, tidak seperti pemacu servo. Hampir semua pemacu servo dapat dengan mudah ditukar menjadi motor yang diarahkan.
Roda boleh dilekatkan terus ke kerusi goyang motor seperti itu, dan sarung servo mudah dipasang.
PERHATIAN! Reka bentuk servo lain mungkin berbeza, dan oleh itu, manual ini hanya serupa.
Servo yang paling mudah dan murah dijadikan asas:

Pertama, kita membongkarnya.

Pertama, kami mengeluarkan elektronik yang tidak diperlukan, menggigit pemandu, dan mengawal motor secara langsung. Seterusnya, kami meneruskan pengubahsuaian mekanik, mengeluarkan gear pertama dengan poros luaran dan mengeluarkan hentian perjalanan daripadanya.



Kami mengeluarkan perintang dan menggigit pembatas yang terletak di badannya.

Kami meletakkan semua mekanik kembali dan memeriksa sama ada semuanya bergerak dengan baik.
Langkah seterusnya adalah memasangkan wayar ke motor.

Memasukkan servo bekas ke motor baru dengan kotak gear.
Segala-galanya sudah siap, jika anda tidak melakukan kesilapan, anda dapat menikmati pekerjaan anda.
Artikel ini membincangkan servo: struktur, tujuan, petua untuk menghubungkan dan mengawal, jenis servo dan perbandingannya. Mari mulakan dan mulakan dengan apa itu servo.
Konsep pemacu servo
Pemacu servo paling sering dipahami sebagai mekanisme dengan motor elektrik, yang dapat diminta untuk beralih ke sudut tertentu dan menahan kedudukan ini. Walau bagaimanapun, ini bukan definisi lengkap.
Secara lebih umum, servo adalah pemacu maklum balas negatif yang membolehkan kawalan parameter pergerakan yang tepat. Drive servo adalah jenis pemacu mekanikal yang merangkumi sensor (kedudukan, kelajuan, daya, dll.) Dan unit kawalan pemacu yang secara automatik mengekalkan parameter yang diperlukan pada sensor dan peranti sesuai dengan nilai luaran yang ditentukan.
Dalam kata lain:
Drive servo menerima nilai parameter kawalan sebagai input. Contohnya, sudut putaran.
Unit kawalan membandingkan nilai ini dengan nilai pada sensornya.
Berdasarkan hasil perbandingan, drive melakukan beberapa tindakan, seperti memutar, mempercepat atau melambat, sehingga nilai dari sensor internal sedekat mungkin dengan nilai parameter kawalan luaran.
Servo yang paling biasa yang mengekalkan sudut tertentu dan servo yang mengekalkan kelajuan putaran tertentu.
Servo hobi biasa ditunjukkan di bawah.
Bagaimana servo diatur?
Peranti servo
Servo mempunyai beberapa komponen.

Pemacu adalah motor elektrik dengan kotak gear. Untuk menukar elektrik menjadi putaran mekanikal, anda memerlukan motor elektrik... Walau bagaimanapun, kelajuan motor sering terlalu tinggi untuk penggunaan praktikal. Untuk mengurangkan kelajuan, gunakan pengurang: mekanisme gear yang menghantar dan menukar tork.
Dengan menghidupkan dan mematikan motor elektrik, kita dapat memutar poros keluaran - gear akhir servo, yang mana kita boleh memasang sesuatu yang ingin kita kendalikan. Walau bagaimanapun, agar kedudukan dikendalikan oleh peranti, perlu sensor maklum balas - pengekodyang akan mengubah sudut putaran kembali menjadi isyarat elektrik. Potensiometer sering digunakan untuk ini. Apabila anda menghidupkan gelangsar potensiometer, rintangannya berubah, sebanding dengan sudut putaran. Oleh itu, ia dapat digunakan untuk menetapkan kedudukan mekanisme semasa.
Sebagai tambahan kepada motor elektrik, kotak gear dan potensiometer, servo drive mempunyai pengisian elektronik yang bertanggungjawab untuk menerima parameter luaran, membaca nilai dari potensiometer, membandingkannya dan menghidupkan / mematikan motor. Dia bertanggungjawab untuk mengekalkan maklum balas negatif.
Terdapat tiga wayar yang menuju ke servo. Dua daripadanya bertanggungjawab untuk menghidupkan motor, yang ketiga memberikan isyarat kawalan yang digunakan untuk mengatur kedudukan peranti.
Sekarang mari kita lihat bagaimana mengawal servo dari luar.
Kawalan servo. Antara muka isyarat kawalan
Untuk menunjukkan kedudukan yang diinginkan ke servo, isyarat kawalan mesti dihantar melalui wayar yang ditentukan. Isyarat kawalan adalah denyutan frekuensi malar dan lebar berubah.

Kedudukan mana yang harus diambil servo bergantung pada panjang denyutan. Apabila isyarat memasuki litar kawalan, penjana denyut di dalamnya menghasilkan nadi, yang durasinya ditentukan melalui potensiometer. Bahagian lain dari litar membandingkan jangka masa kedua denyutan. Sekiranya tempohnya berbeza, motor elektrik menyala. Arah putaran ditentukan oleh denyutan mana yang lebih pendek. Sekiranya panjang nadi sama, motor berhenti.
Selalunya dalam serbuan hobi, denyutan dihasilkan pada frekuensi 50 Hz. Ini bermaksud bahawa nadi dipancarkan dan diterima setiap 20 ms. Biasanya, lebar nadi 1520 μs bermaksud bahawa servo harus berada di posisi tengah. Menambah atau menurunkan panjang nadi akan menyebabkan servo masing-masing berpusing mengikut arah jam atau lawan jam. Dalam kes ini, terdapat had atas dan bawah jangka masa nadi. Di perpustakaan Servo untuk Arduino, panjang nadi berikut ditetapkan secara lalai: 544 μs untuk 0 ° dan 2400 μs untuk 180 °.
Harap maklum bahawa peranti khusus anda mungkin mempunyai tetapan kilang yang berbeza. Beberapa servos menggunakan lebar denyut 760 μs. Dalam kes ini, posisi tengah sepadan dengan 760 µs, dengan cara yang sama seperti pada servo konvensional, posisi tengah sesuai dengan 1520 µs.
Perlu juga diperhatikan bahawa ini hanya panjang lebar. Walaupun dalam model servo yang sama, mungkin terdapat toleransi pembuatan yang menghasilkan jarak operasi panjang nadi yang sedikit berbeza. Untuk operasi yang tepat, setiap servo tertentu mesti dikalibrasi: melalui eksperimen, perlu memilih julat yang betul yang menjadi ciri daripadanya.
Apa lagi yang perlu diperhatikan adalah kekeliruan dalam terminologi. Cara mengawal servo sering disebut PWM / PWM (Pulse Width Modulation) atau PPM (Pulse Position Modulation). Ini tidak berlaku, dan menggunakan kaedah ini malah boleh merosakkan pemacu. Istilah yang betul ialah PDM (Pulse Duration Modulation). Di dalamnya, panjang nadi sangat penting dan kekerapan kejadiannya tidak begitu penting. 50 Hz tidak apa-apa, tetapi servo akan berfungsi dengan betul pada 40 dan 60 Hz. Satu-satunya perkara yang perlu diingat dalam kes ini adalah bahawa dengan penurunan frekuensi yang kuat, ia dapat berfungsi secara tersentak dan pada daya yang berkurang, dan dengan perkiraan frekuensi yang terlalu tinggi (misalnya, 100 Hz) ia boleh menjadi terlalu panas dan gagal.
Ciri-ciri servo
Sekarang mari kita fikirkan jenis servo dan ciri apa yang ada pada mereka.
Kelajuan tork dan ayunan
Pertama, mari kita bincangkan dua ciri servo yang sangat penting: tork dan kira-kira kelajuan swing.
Momen daya, atau tork, adalah kuantiti fizikal vektor yang sama dengan produk vektor jejari yang diambil dari paksi putaran ke titik penerapan daya oleh vektor daya ini. Ia mencirikan tindakan putaran daya pada pepejal.

Secara sederhana, ciri ini menunjukkan betapa beratnya beban yang dapat ditahan oleh servo pada tuas dengan panjang tertentu. Sekiranya tork servo adalah 5 kg × cm, ini bermakna servo akan memegang lengan panjang 1 cm secara mendatar, di hujung bebas yang 5 kg digantung. Atau, bersamaan, lengan panjang 5 cm yang 1 kg digantung.
Kelajuan servo diukur dengan jumlah masa yang diperlukan untuk lengan servo berputar 60 °. Ciri 0.1 s / 60 ° bermaksud servo akan berputar 60 ° dalam 0.1 s. Dari itu mudah untuk mengira kelajuan dalam nilai yang lebih biasa, revolusi per minit, tetapi kebetulan ketika menggambarkan servos, unit seperti itu paling sering digunakan.
Perlu diingat bahawa kadang-kadang kita harus mencari kompromi antara kedua ciri ini, kerana jika kita mahukan servo yang berat dan boleh dipercayai, maka kita mesti bersiap sedia untuk rig yang kuat ini untuk berubah perlahan. Dan jika kita mahukan pemanduan yang sangat pantas, maka agak mudah untuk membuatnya tidak seimbang. Apabila menggunakan motor yang sama, keseimbangan ditentukan oleh konfigurasi gear di kotak gear.
Sudah tentu, kita selalu boleh menggunakan pemasangan yang menghabiskan banyak tenaga, yang utama ialah ciri-cirinya memenuhi keperluan kita.
Faktor bentuk
Servo berbeza dari segi saiz. Dan walaupun tidak ada klasifikasi rasmi, pengeluar telah lama mematuhi beberapa ukuran dengan susunan pengikat yang diterima umum. Mereka boleh dibahagikan kepada:
kecil
standard
Pada masa yang sama, mereka mempunyai dimensi ciri berikut:
Terdapat juga yang disebut servo "khas" dengan dimensi yang tidak termasuk dalam klasifikasi ini, tetapi peratusan servo tersebut sangat kecil.
Antara muka dalaman
Servo boleh menjadi analog dan digital. Jadi apa perbezaan, kelebihan dan kekurangan mereka?
Secara luaran, mereka tidak berbeza: motor elektrik, kotak gear, potensiometernya sama, ia hanya berbeza pada elektronik kawalan dalaman. Daripada rangkaian mikro khas untuk pemacu servo analog, saudara digital dapat dilihat di papan dengan mikropemproses yang menerima denyutan, menganalisisnya dan mengawal motor. Oleh itu, dalam prestasi fizikal, satu-satunya perbezaan adalah dalam kaedah memproses impuls dan mengawal motor.

Kedua-dua jenis servo ini menerima denyutan kawalan yang sama. Servo analog kemudian memutuskan sama ada kedudukan perlu diubah dan menghantar isyarat ke motor jika perlu. Ini biasanya berlaku dengan frekuensi 50 Hz. Oleh itu, kita mendapat 20 ms - masa tindak balas minimum. Pada masa ini, sebarang pengaruh luaran dapat mengubah kedudukan servo. Tetapi ini bukan satu-satunya masalah. Pada waktu rehat, tidak ada voltan yang dikenakan pada motor elektrik; Sekiranya terdapat sedikit penyimpangan dari keseimbangan, isyarat daya rendah pendek dihantar ke motor elektrik. Semakin besar penyimpangan, semakin kuat isyaratnya. Oleh itu, dengan penyimpangan kecil, servo tidak dapat memutar motor dengan cepat atau mengembangkan tork yang besar. "Zon mati" terbentuk dalam masa dan jarak.
Masalah-masalah ini dapat diselesaikan dengan meningkatkan frekuensi penerimaan, pemprosesan isyarat dan kawalan motor. Pemacu servo digital menggunakan pemproses khas yang menerima denyutan kawalan, memprosesnya dan menghantar isyarat ke motor dengan frekuensi 200 Hz atau lebih. Ternyata servo digital dapat bertindak balas lebih cepat terhadap pengaruh luaran, untuk mengembangkan kelajuan dan tork yang diperlukan lebih cepat, yang bermaksud lebih baik memegang posisi tertentu, yang bagus. Sudah tentu, ia juga menggunakan lebih banyak elektrik. Juga, servo digital lebih sukar dihasilkan, dan oleh itu kosnya lebih tinggi. Sebenarnya, dua kelemahan ini adalah semua kelemahan yang dimiliki oleh servo digital. Dari segi teknikal, mereka mengalahkan servo analog tanpa syarat.
Bahan gear
Gear servo terdapat dalam pelbagai bahan: plastik, karbon, logam. Kesemuanya digunakan secara meluas, pilihannya bergantung pada tugas tertentu dan pada ciri apa yang diperlukan dalam pemasangan.

Gigi plastik, paling kerap nilon, gear sangat ringan, tidak usang, dan paling biasa digunakan pada servo. Mereka tidak dapat menahan beban yang berat, tetapi jika bebannya seharusnya kecil, maka roda gigi nilon adalah pilihan terbaik.
Gear karbon lebih tahan lama, praktikal tidak luntur, dan beberapa kali lebih kuat daripada gear nilon. Kelemahan utama adalah kos yang tinggi.
Gear logam adalah yang paling berat, tetapi mereka dapat menahan beban maksimum. Mereka cepat habis sehingga anda mesti menukar gear hampir setiap musim. Gear titanium adalah kegemaran di antara gear logam, baik dari segi prestasi dan harga. Malangnya, mereka akan memakan banyak kos.
Motor tanpa berus dan tidak berus
Terdapat tiga jenis motor servo: motor teras biasa, motor tanpa corak, dan motor tanpa berus.

Motor teras konvensional (kanan) mempunyai rotor besi padat yang dililit wayar dan magnet di sekelilingnya. Rotor mempunyai beberapa bahagian, jadi ketika motor berputar, rotor menyebabkan motor bergetar sedikit ketika bahagian melewati magnet, menghasilkan servo yang bergetar dan kurang tepat daripada servo dengan motor tanpa karat. Motor rotor berongga (kiri) mempunyai teras magnet tunggal dengan silinder atau loceng berliku di sekitar magnet. Reka bentuk tanpa corak lebih ringan dan tidak mempunyai bahagian, menghasilkan tindak balas yang lebih cepat dan operasi bebas getaran yang lebih lancar. Motor ini lebih mahal, tetapi memberikan tahap kawalan, tork dan kelajuan yang lebih tinggi daripada motor standard.

Servo tanpa berus agak baru. Kelebihannya sama seperti motor tanpa berus yang lain: tidak ada berus, yang bermaksud ia tidak menimbulkan ketahanan terhadap putaran dan tidak luntur, kelajuan dan torknya lebih tinggi dengan penggunaan arus sama dengan motor pemungut. Servo tanpa berus adalah servo yang paling mahal, tetapi ia menawarkan prestasi yang lebih baik daripada servo dengan jenis motor lain.
Bersambung ke Arduino
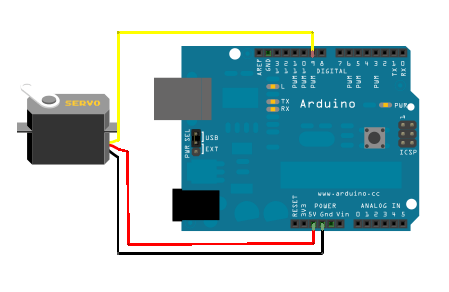
Banyak servo boleh dihubungkan ke Arduino secara langsung. Untuk melakukan ini, kereta api dengan tiga wayar pergi dari mereka:
merah - makanan; menyambung ke pin 5V atau terus ke bekalan kuasa
coklat atau hitam - bumi
kuning atau putih - isyarat; menyambung ke output digital Arduino.
Untuk menyambung ke Arduino, lebih mudah menggunakan papan pengembang pelabuhan seperti Troyka Shield. Walaupun dengan beberapa wayar tambahan, anda boleh menyambungkan servo melalui papan roti atau terus ke pin Arduino.
Adalah mungkin untuk menghasilkan denyut kawalan sendiri, tetapi ini adalah tugas yang biasa dilakukan oleh pustaka standard Servo untuk mempermudahnya.
Sekatan makanan
Servo hobi biasa menarik lebih daripada 100mA semasa operasi. Pada masa yang sama, Arduino mampu menghasilkan hingga 500 mA. Oleh itu, jika anda perlu menggunakan servo yang hebat dalam projek anda, masuk akal untuk memikirkan mengalokasikannya ke rangkaian dengan kuasa tambahan.
Mari kita pertimbangkan contoh menyambungkan servo 12V: 
Hadkan bilangan servo yang disambungkan
Pada kebanyakan papan Arduino, perpustakaan Servo menyokong maksimum 12 servo, pada Arduino Mega jumlah ini meningkat menjadi 48. Walau bagaimanapun, terdapat sedikit kesan sampingan penggunaan perpustakaan ini: jika anda tidak bekerja dengan Arduino Mega, menjadi mustahil untuk menggunakan fungsi analogWrite () pada 9 dan 10 pin tidak kira sama ada servo disambungkan ke pin ini atau tidak. Arduino Mega dapat menyambungkan hingga 12 servo tanpa mengganggu operasi PWM / PWM, dengan lebih banyak servo kita tidak akan dapat menggunakan analogWrite () pada pin 11 dan 12.
Fungsi perpustakaan servo
Perpustakaan Servo membenarkan kawalan perisian pemacu servo. Untuk ini, pembolehubah jenis Servo disediakan. Pengurusan dijalankan dengan fungsi berikut:
attach () - melampirkan pemboleh ubah ke pin tertentu. Terdapat dua kemungkinan sintaks untuk fungsi ini: servo.attach (pin) dan servo.attach (pin, min, max). Dalam kes ini, pin adalah bilangan pin yang disambungkan oleh servo, min dan maksimum adalah panjang nadi dalam mikrodetik, yang bertanggungjawab untuk sudut putaran 0 ° dan 180 °. Secara lalai, masing-masing ditetapkan sama dengan 544 μs dan 2400 μs.
tulis () - memerintahkan servo untuk menerima beberapa nilai parameter. Sintaksnya adalah servo.write (sudut), di mana sudut adalah sudut yang harus diputar oleh servo.
writeMicroseconds () - memberikan perintah untuk menghantar panjang tertentu ke servo, adalah analog tahap rendah dari perintah sebelumnya. Sintaksnya adalah servo.writeMicroseconds (uS), di mana uS adalah panjang nadi dalam mikrodetik.
baca () - membaca nilai sudut semasa servo berada. Sintaksnya adalah servo.read (), nilai integer antara 0 dan 180 dikembalikan.
dilampirkan () - periksa sama ada pemboleh ubah telah dilampirkan pada pin tertentu. Sintaksnya adalah servo.attached (), yang mengembalikan boolean jika pemboleh ubah dilampirkan ke pin apa pun, atau sebaliknya.
detach () - melakukan tindakan sebaliknya untuk melampirkan (), iaitu melepaskan pemboleh ubah dari pin yang dilampirkan. Sintaksnya adalah servo.detach ().
Semua kaedah perpustakaan Servo2 sama dengan kaedah Servo.
Contoh penggunaan pustaka Servo
Bukannya kesimpulan
Servo berbeza, ada yang lebih baik - yang lain lebih murah, ada yang lebih dipercayai - yang lain lebih tepat. Dan sebelum anda membeli servo, ingat bahawa ia mungkin tidak mempunyai prestasi terbaik, asalkan sesuai untuk projek anda. Semoga berjaya dalam usaha anda!
Dalam artikel ini, kita akan membincangkan tentang servo dalam projek Arduino. Terima kasih kepada motor servo bahawa projek elektronik konvensional menjadi robotik. Menyambungkan servo ke projek Arduino membolehkan anda bertindak balas terhadap isyarat sensor dengan pergerakan yang tepat, misalnya, membuka pintu atau menghidupkan sensor ke arah yang betul. Artikel ini membincangkan isu-isu mengendalikan pemacu servo, kemungkinan skema untuk menghubungkan servo ke arduino, dan juga contoh lakaran.
Pemacu servo adalah jenis pemacu yang dapat mengawal parameter pergerakan dengan tepat. Dengan kata lain, ini adalah motor yang dapat memutar porosnya pada sudut tertentu atau mengekalkan putaran berterusan dengan jangka masa yang tepat.
Skema pemacu servo didasarkan pada penggunaan maklum balas (gelung gelung tertutup di mana isyarat input dan output tidak sepadan). Segala jenis pemacu mekanikal boleh bertindak sebagai pemacu servo, yang merangkumi sensor dan unit kawalan yang secara automatik mengekalkan semua parameter yang ditetapkan pada sensor. Struktur servo terdiri daripada motor, sensor penentududukan dan sistem kawalan. Tugas utama alat tersebut adalah pelaksanaan dalam bidang mekanisme servo. Juga, pemacu servo sering digunakan di bidang seperti pengendalian bahan, pembuatan peralatan pengangkutan, pemprosesan kayu, pengeluaran logam lembaran, pengeluaran bahan binaan dan lain-lain.
Dalam projek robotik arduino, servo sering digunakan untuk tindakan mekanikal yang paling mudah:
- Putar pengintai jarak atau sensor lain ke sudut tertentu untuk mengukur jarak dalam bidang pandangan robot yang sempit.
- Lakukan langkah kecil dengan kaki, gerakkan anggota badan atau kepala anda.
- Untuk mencipta manipulator robot.
- Untuk melaksanakan mekanisme stereng.
- Buka atau tutup pintu, kepak, atau objek lain.
Sudah tentu, skop penggunaan servo dalam projek sebenar jauh lebih luas, tetapi contoh yang diberikan adalah litar yang paling popular.
Litar dan jenis servo

Prinsip pemacu servo didasarkan pada maklum balas dari satu atau lebih isyarat sistem. Indikator output dimasukkan ke input, di mana nilainya dibandingkan dengan tindakan rujukan dan tindakan yang diperlukan dilakukan - misalnya, mesin dimatikan. Pelaksanaan yang paling mudah adalah resistor berubah-ubah, yang dikendalikan oleh poros - apabila parameter perintang berubah, parameter arus yang membekalkan motor berubah.
Dalam pemacu servo sebenar, mekanisme kawalan jauh lebih kompleks dan menggunakan litar mikro pengawal terbina dalam. Bergantung pada jenis mekanisme maklum balas yang digunakan, analog dan digital servo. Yang pertama menggunakan sesuatu yang kelihatan seperti potensiometer, yang kedua menggunakan pengawal.
 Keseluruhan litar kawalan servo terletak di dalam perumahan, isyarat kawalan dan kuasa dibekalkan, sebagai peraturan, melalui tiga wayar: tanah, voltan bekalan dan isyarat kawalan.
Keseluruhan litar kawalan servo terletak di dalam perumahan, isyarat kawalan dan kuasa dibekalkan, sebagai peraturan, melalui tiga wayar: tanah, voltan bekalan dan isyarat kawalan.
Servo putaran berterusan 360, 180 dan 270 darjah
Terdapat dua jenis servomotor utama - dengan putaran berterusan dan dengan sudut tetap (paling kerap 180 atau 270 darjah). Perbezaan antara servo putaran terhad terletak pada elemen mekanikal struktur, yang dapat menyekat pergerakan poros di luar sudut yang ditentukan. Setelah mencapai sudut 180, poros akan bertindak pada limiter, dan dia akan memberi perintah untuk mematikan motor. Servomotor berterusan tidak mempunyai had.
Bahan Gear Servo
Dengan kebanyakan servos, hubungan antara poros dan elemen luaran adalah roda gigi, jadi sangat penting bahan itu terbuat dari mana. Pilihan yang paling berpatutan adalah dua: gear logam atau plastik. Dalam model yang lebih mahal, anda boleh menemui unsur yang terbuat dari karbon dan juga titanium.


Varian plastik secara semula jadi lebih murah, lebih senang dihasilkan, dan sering digunakan dalam model servo murah. Untuk projek pendidikan, ketika servo membuat beberapa pergerakan, ini bukan masalah besar. Tetapi dalam projek yang serius, penggunaan plastik adalah mustahil, memandangkan penggunaan gear seperti ini sangat cepat.
 Gear logam lebih dipercayai, tetapi ini pasti mempengaruhi harga dan berat model. Pengilang berjimat cermat boleh membuat beberapa bahagian plastik, dan beberapa logam, ini juga harus diingat. Dan, tentu saja, kehadiran gear logam dalam model paling murah bukanlah jaminan kualiti.
Gear logam lebih dipercayai, tetapi ini pasti mempengaruhi harga dan berat model. Pengilang berjimat cermat boleh membuat beberapa bahagian plastik, dan beberapa logam, ini juga harus diingat. Dan, tentu saja, kehadiran gear logam dalam model paling murah bukanlah jaminan kualiti.
Titanium atau gear karbon adalah pilihan yang disukai jika anda tidak mempunyai anggaran. Ringan dan boleh dipercayai, servo seperti ini banyak digunakan untuk membuat model kereta, drone dan kapal terbang.
Kelebihan motor servo
Penggunaan servo drive yang meluas disebabkan oleh kenyataan bahawa mereka mempunyai operasi yang stabil, ketahanan tinggi terhadap gangguan, ukuran kecil dan jarak kawalan kelajuan yang luas. Ciri penting pemacu servo adalah keupayaan untuk meningkatkan kuasa dan memberikan maklum balas maklumat. Dan ini menunjukkan bahawa, ke arah depan, litar adalah pemancar tenaga, dan ke arah sebaliknya, ia adalah pemancar maklumat, yang digunakan untuk meningkatkan ketepatan kawalan.
Perbezaan antara servo dan motor konvensional
Dengan menghidupkan atau mematikan motor elektrik konvensional, kita dapat menghasilkan gerakan putaran dan membuat roda atau objek lain yang dilekatkan pada poros bergerak. Pergerakan ini akan berterusan, tetapi untuk memahami pada sudut apa poros berpusing atau berapa revolusi yang dibuatnya, perlu memasang elemen luaran tambahan: pengekod. Drive servo sudah mengandungi semua yang anda perlukan untuk mendapatkan maklumat mengenai parameter putaran semasa dan dapat dimatikan sendiri apabila poros beralih ke sudut yang diperlukan.
Perbezaan antara motor servo dan stepper
 Perbezaan penting antara motor servo dan motor stepper adalah keupayaan untuk beroperasi pada pecutan tinggi dan di bawah beban berubah. Motor servo juga lebih berkuasa. Motor stepper tidak mempunyai maklum balas, oleh itu kesan kehilangan langkah dapat diperhatikan, pada motor servo, kehilangan langkah dikecualikan - semua pelanggaran akan direkodkan dan diperbaiki. Dengan semua kelebihan yang jelas ini, motor servo lebih mahal daripada motor stepper, mempunyai sistem pendawaian dan kawalan yang lebih kompleks, dan memerlukan penyelenggaraan yang lebih berkelayakan. Penting untuk diperhatikan bahawa motor stepper dan servo bukan pesaing langsung - setiap peranti ini mempunyai kawasan aplikasi yang tersendiri.
Perbezaan penting antara motor servo dan motor stepper adalah keupayaan untuk beroperasi pada pecutan tinggi dan di bawah beban berubah. Motor servo juga lebih berkuasa. Motor stepper tidak mempunyai maklum balas, oleh itu kesan kehilangan langkah dapat diperhatikan, pada motor servo, kehilangan langkah dikecualikan - semua pelanggaran akan direkodkan dan diperbaiki. Dengan semua kelebihan yang jelas ini, motor servo lebih mahal daripada motor stepper, mempunyai sistem pendawaian dan kawalan yang lebih kompleks, dan memerlukan penyelenggaraan yang lebih berkelayakan. Penting untuk diperhatikan bahawa motor stepper dan servo bukan pesaing langsung - setiap peranti ini mempunyai kawasan aplikasi yang tersendiri.
Tempat Membeli Servo Popular SG90, MG995, MG996
 Opsyen Servo SG90 1.6KG Paling Mampu Opsyen Servo SG90 1.6KG Paling Mampu
|
 Servos SG90 dan MG90S untuk Arduino dengan harga di bawah 70 rubel Servos SG90 dan MG90S untuk Arduino dengan harga di bawah 70 rubel
|
 Versi lain dari servo SG90 Pro 9g dari pembekal yang dipercayai pada Ali Versi lain dari servo SG90 Pro 9g dari pembekal yang dipercayai pada Ali
|
 Servo SG90 dari pembekal dipercayai RobotDyn Servo SG90 dari pembekal dipercayai RobotDyn
|
 Penguji servo Penguji servo
|
 Beberapa pilihan untuk penguji servo Beberapa pilihan untuk penguji servo
|
 Servo terlindung dengan tork 15 kg Servo terlindung dengan tork 15 kg
|
 Servo JX DC5821LV 21KG Gear mental teras kalis air penuh 1/8 1/10 RC car Scaler Buggy Crawler TRAXXAS RC4WD TRX-4 SCX10 D90 Servo JX DC5821LV 21KG Gear mental teras kalis air penuh 1/8 1/10 RC car Scaler Buggy Crawler TRAXXAS RC4WD TRX-4 SCX10 D90
|
 Servo MG996R MG996 Servo Metal Gear untuk Futaba JR Servo MG996R MG996 Servo Metal Gear untuk Futaba JR
|
 Servo 13KG 15KG Servos Digital MG995 MG996 MG996R Servo Metal Gear Servo 13KG 15KG Servos Digital MG995 MG996 MG996R Servo Metal Gear
|
 Faktor penentu dalam kawalan pemacu servo adalah isyarat kawalan, yang merupakan frekuensi tetap dan denyut lebar berubah. Panjang nadi adalah salah satu parameter terpenting yang menentukan kedudukan servo. Panjang ini dapat diatur dalam program secara manual menggunakan pilihan melalui sudut atau menggunakan perintah perpustakaan. Panjangnya mungkin berbeza untuk setiap jenama peranti.
Faktor penentu dalam kawalan pemacu servo adalah isyarat kawalan, yang merupakan frekuensi tetap dan denyut lebar berubah. Panjang nadi adalah salah satu parameter terpenting yang menentukan kedudukan servo. Panjang ini dapat diatur dalam program secara manual menggunakan pilihan melalui sudut atau menggunakan perintah perpustakaan. Panjangnya mungkin berbeza untuk setiap jenama peranti.
Apabila isyarat memasuki litar kawalan, penjana memberikan impulsnya, yang durasinya ditentukan menggunakan potensiometer. Di bahagian litar yang lain, tempoh isyarat yang digunakan dan isyarat dari penjana dibandingkan. Sekiranya isyarat ini berbeza dalam jangka masa, motor elektrik dihidupkan, arah putarannya ditentukan oleh nadi mana yang lebih pendek. Sekiranya panjang nadi sama, motor berhenti.
 Frekuensi standard di mana nadi digunakan ialah 50 Hz, iaitu 1 denyut setiap 20 milisaat. Pada nilai ini, durasinya adalah 1520 mikrodetik, dan servo berada di kedudukan tengah. Mengubah panjang nadi mengarah pada putaran servo - dengan durasi yang semakin meningkat, putarannya mengikut arah jam, dan menurun - berlawanan arah jarum jam. Terdapat had jangka masa - di Arduino di perpustakaan Servo untuk 0 °, nilai nadi ditetapkan ke 544 μs (had bawah), untuk 180 ° - 2400 μs (had atas).
Frekuensi standard di mana nadi digunakan ialah 50 Hz, iaitu 1 denyut setiap 20 milisaat. Pada nilai ini, durasinya adalah 1520 mikrodetik, dan servo berada di kedudukan tengah. Mengubah panjang nadi mengarah pada putaran servo - dengan durasi yang semakin meningkat, putarannya mengikut arah jam, dan menurun - berlawanan arah jarum jam. Terdapat had jangka masa - di Arduino di perpustakaan Servo untuk 0 °, nilai nadi ditetapkan ke 544 μs (had bawah), untuk 180 ° - 2400 μs (had atas).

(Gambar terpakai dari amperka.ru)
Penting untuk diperhatikan bahawa tetapan pada peranti tertentu mungkin sedikit berbeza dari nilai yang diterima umum. Untuk sesetengah peranti, kedudukan rata-rata dan lebar nadi boleh sama dengan 760 μs. Semua nilai yang diterima juga mungkin sedikit berbeza kerana kesalahan yang dapat dilakukan semasa pembuatan peranti.
Kaedah kawalan pemacu sering keliru disebut PWM / PWM, tetapi ini tidak sepenuhnya betul. Kawalan secara langsung bergantung pada panjang nadi, kekerapan kejadiannya tidak begitu penting. Operasi yang betul akan dipastikan pada 40 Hz dan 60 Hz, hanya penurunan atau peningkatan frekuensi yang kuat akan menyumbang. Sekiranya penurunan mendadak, servo akan mula berfungsi secara tersentak; jika frekuensi terlalu tinggi di atas 100 Hz, peranti mungkin terlalu panas. Oleh itu, lebih tepat untuk menyebutnya PDM.
Antara muka dalaman boleh dibahagikan kepada servo analog dan digital. Tidak ada perbezaan luaran - semua perbezaan hanya terdapat pada elektronik dalaman. Pemacu servo analog mengandungi litar mikro khas di dalamnya, digital - mikropemproses yang menerima dan menganalisis denyutan.

Semasa menerima isyarat, servo analog membuat keputusan sama ada untuk menukar kedudukan atau tidak, dan, jika perlu, menghantar isyarat ke motor dengan frekuensi 50 Hz. Selama masa reaksi (20 ms), pengaruh luaran dapat terjadi yang akan mengubah posisi servo, dan peranti tidak akan mempunyai masa untuk bertindak balas. Pemacu servo digital menggunakan pemproses yang menghantar dan memproses isyarat dengan frekuensi yang lebih tinggi - dari 200 Hz, sehingga dapat bertindak balas lebih cepat terhadap pengaruh luaran, mengembangkan kelajuan dan tork yang diperlukan lebih cepat. Oleh itu, servo digital lebih baik memegang kedudukan yang ditetapkan. Walau bagaimanapun, servo digital memerlukan lebih banyak kuasa untuk beroperasi, yang meningkatkan kos. Kerumitan pengeluaran mereka juga memberikan sumbangan besar terhadap harga. Kos yang tinggi adalah satu-satunya kelemahan servo digital, secara teknikalnya jauh lebih baik daripada peranti analog.
Menyambungkan motor servo ke arduino
Servo mempunyai tiga kenalan, yang berwarna berbeza. Kawat coklat mengarah ke tanah, yang merah ke bekalan kuasa + 5V, wayar oren atau kuning adalah wayar isyarat. Peranti disambungkan ke Arduino melalui papan roti dengan cara yang ditunjukkan dalam gambar. Wayar oren (isyarat) menghubungkan ke pin digital, wayar hitam dan merah ke tanah dan kuasa, masing-masing. Untuk mengawal motor servo, tidak diperlukan untuk menyambung ke pin PWM - kita telah menerangkan prinsip kawalan servo lebih awal.
Tidak disarankan untuk menghubungkan servo yang kuat terus ke papan, kerana mereka membuat arus untuk rangkaian kuasa Arduino yang tidak sesuai dengan kehidupan - bernasib baik jika perlindungan berfungsi. Gejala yang paling biasa dari servo overload dan bekalan kuasa yang tidak betul adalah servo jerking, suara yang tidak menyenangkan, dan reboot board. Untuk mendapatkan kuasa, lebih baik menggunakan sumber luaran, pastikan untuk menggabungkan asas kedua litar.
Lakarkan untuk mengawal servo di Arduino
Mengendalikan servo secara langsung dengan mengubah lebar nadi dalam lakaran adalah tugas yang agak tidak biasa, tetapi untungnya kita mempunyai perpustakaan Servo yang hebat yang dibangun di dalam persekitaran pengembangan Arduino. Kami akan mempertimbangkan semua nuansa pengaturcaraan dan bekerja dengan servo dalam artikel yang berasingan. Berikut adalah contoh termudah menggunakan Servo.
Algoritma kerja mudah:
- Pertama, kami memasukkan Servo.h
- Buat objek kelas Servo
- Di blok persediaan, nyatakan pin mana servo dihubungkan
- Kami menggunakan kaedah objek dengan cara C ++ biasa. Yang paling popular adalah kaedah menulis, yang mana kita memberi nilai integer dalam darjah (untuk servo 360, nilai-nilai ini akan ditafsirkan secara berbeza).
Contoh lakaran ringkas untuk bekerja dengan servo
Contoh projek di mana kita segera menetapkan motor servo ke sudut sifar dan kemudian memutarnya 90 darjah.
#sertakan
Lakarkan untuk dua servo
Dan dalam contoh ini, kami bekerja dengan dua servo sekaligus:
#sertakan
Kawalan servo dengan potensiometer
Dalam contoh ini, kita memutar servo bergantung pada nilai yang diperoleh dari potensiometer. Kami membaca nilainya dan mengubahnya menjadi sudut menggunakan fungsi peta:
// Kerangka contoh standard menggunakan gelung void pustaka Servo () (val \u003d analogRead (A0); // Baca nilai dari pin yang disambungkan oleh potensiometer val \u003d peta (val, 0, 1023, 0, 180); // Tukarkan nombor dalam julat 0 hingga 1023 hingga julat baru 0 hingga 180 servo.write (val); delay (15);)

Ciri dan Sambungan SG-90
Sekiranya anda ingin membeli servo termurah dan termudah, maka SG 90 adalah pilihan terbaik. Servo ini paling sering digunakan untuk mengendalikan mesin ringan dan kecil dengan sudut putaran 0 ° hingga 180 °.
Spesifikasi SG90:
- Kelajuan pemprosesan perintah 0.12s / 60 darjah;
- Kuasa 4.8V;
- Suhu kerja dari -30C hingga 60C;
- Dimensi 3.2 x 1.2 x 3 cm;
- Berat 9 g.
Penerangan SG90
Warna wayar adalah standard. Servo itu murah dan tidak memberikan penyesuaian yang tepat pada posisi awal dan akhir. Untuk mengelakkan kelebihan beban yang tidak perlu dan ciri-ciri keretakan pada kedudukan 0 dan 180 darjah, lebih baik menetapkan titik ekstrem pada 10 ° dan 170 °. Penting untuk memantau voltan bekalan semasa mengendalikan peranti Sekiranya penunjuk ini terlalu tinggi, elemen mekanikal mekanisme gear mungkin rosak.
Servos MG995 dan MG996 menara pro
Servo MG995 adalah model servo kedua paling popular yang paling sering dihubungkan dengan projek Arduino. Ini adalah servo yang agak murah dengan prestasi yang jauh lebih baik daripada SG90.
Spesifikasi MG995
Poros keluaran MG995 berputar 120 darjah (60 di setiap arah), walaupun banyak penjual memetik 180 darjah. Peranti ini dijalankan dalam kotak plastik.
- Berat 55 g;
- Tork 8.5 kg x cm;
- Kelajuan 0.2s / 60 darjah (pada 4.8V);
- Bekalan kuasa kerja 4.8 - 7.2V;
- Suhu kerja - dari 0C hingga -55C.
Penerangan MG995
Sambungan ke arduino juga berlaku melalui tiga wayar. Pada prinsipnya, untuk projek hobi, ia dibenarkan menyambungkan MG995 terus ke Arduino, tetapi arus motor akan selalu menimbulkan beban berbahaya untuk input papan, jadi tetap disarankan untuk menghidupkan servo secara berasingan, ingat untuk menghubungkan permukaan kedua gelung kuasa. Pilihan lain yang menjadikan hidup lebih mudah adalah menggunakan pengawal dan perisai servo siap pakai, tinjauan yang akan kami siapkan dalam artikel yang berasingan.
MG996R serupa dengan MG995 pada ciri-cirinya, hanya dibuat dalam kotak logam.
Menukar servo menjadi servo putaran berterusan
Seperti yang dijelaskan di atas, servo didorong oleh denyut lebar berubah-ubah yang menetapkan sudut kemudi. Kedudukan semasa dibaca dari potensiometer. Sekiranya anda melepaskan poros dan potensiometer, servomotor akan mengambil kedudukan slaid potensiometer seperti pada titik tengah. Semua tindakan ini akan membawa kepada kenyataan bahawa maklum balas akan dikeluarkan. Ini membolehkan anda mengawal kelajuan dan arah putaran melalui wayar isyarat, dan membuat servo putaran berterusan. Penting untuk diperhatikan bahawa servo putaran tetap tidak boleh berputar melalui sudut tertentu dan membuat bilangan putaran yang ditentukan dengan ketat.
Untuk melakukan tindakan di atas, anda perlu membongkar peranti dan membuat perubahan pada reka bentuk.
Dalam Arduino IDE, anda perlu membuat lakaran kecil yang akan meletakkan rocker di kedudukan tengah.
#sertakan
Selepas itu, peranti mesti disambungkan ke Arduino. Apabila disambungkan, servo akan mula berputar. Adalah perlu untuk mencapai penghentian sepenuhnya dengan mengatur perintang. Selepas putaran berhenti, anda perlu mencari poros, tarik elemen fleksibel dari dalamnya dan pasangkannya kembali.
Kaedah ini mempunyai beberapa kelemahan - penyesuaian perintang ke berhenti sepenuhnya tidak stabil, dengan sedikit kejutan / pemanasan / penyejukan, titik sifar yang disesuaikan dapat hilang. Oleh itu, lebih baik menggunakan kaedah penggantian potensiometer dengan perapi. Untuk melakukan ini, anda perlu mengeluarkan potensiometer dan menggantinya dengan perintang perapi dengan rintangan yang sama. Titik sifar mesti disesuaikan dengan lakaran penentukuran.
Apa-apa kaedah menukar servo menjadi servo putaran berterusan mempunyai kekurangannya. Pertama, sukar untuk mengatur titik sifar, pergerakan apa pun dapat menjatuhkannya. Kedua, julat kawalan kecil - dengan sedikit perubahan lebar nadi, kelajuan dapat berubah dengan ketara. Anda boleh memperluas jangkauan secara terprogram di Arduino.
Kesimpulannya
Servos memainkan peranan yang sangat penting dalam banyak projek Arduino, dari robotik hingga sistem rumah pintar. Segala sesuatu yang berkaitan dengan gerakan secara tradisional memerlukan pengetahuan khas dan membuat pemacu yang lengkap dan berfungsi dengan baik bukanlah tugas yang mudah. Tetapi dengan bantuan motor servo, tugas dapat disederhanakan dalam banyak keadaan, itulah sebabnya servo selalu digunakan walaupun dalam projek peringkat permulaan.
Dalam artikel ini, kami cuba mendedahkan aspek yang berbeza dalam menggunakan pemacu servo dalam projek arduino: dari menyambung hingga menulis lakaran. Dengan memilih model servo termudah (misalnya, sg 90), anda boleh mengulangi contoh yang diberikan dengan mudah dan membuat projek pertama anda di mana sesuatu bergerak dan berubah. Kami harap artikel ini dapat membantu anda dalam hal ini.









Cara menghubungkan Twitter ke VKontakte
Hapuskan ERR_CONNECTION_REFUSED VKontakte
Sambungan terputus: membetulkan ralat penyemak imbas
Bateri Tesla Model S
Posts tagged pelajaran nyanyian Tugas paling mendesak