Servomuzu sökmek için bir tornavidaya ihtiyacımız var. Çünkü Çok küçük bir servoyu söküyorum, ardından ilgili tornavidaya ihtiyaç var. Ben şahsen bazı ucuz Çin setlerinden tornavidalar kullanıyorum. Alt geçitte bir kiosktan yaklaşık 5 dolara satın aldım, bu yüzden çok pahalı değil.
Servoyu açmak için yalnızca dört vidayı sökmeniz gerekir. Alt kapakta bulunurlar. Gevşetin:

Kapağı çıkardıktan sonra kontrol ünitesini görebilirsiniz. Ayrıntılara girmeyeceğim, yine de buradan kaldıracağım. İki telin geçtiği bir motor da görülebilir.

Redüktörün dişlilerini görebileceğiniz üstte bir kapak da vardır. İkisinin potansiyometreye sabitlendiğini belirtmek gerekir - bu oldukça önemlidir, çünkü dişli kutusunun işlevini yerine getirmeye devam etmesi için potansiyometreyi gerçekten kırmamız gerekecek - bunu sadece dişliler için bir eksen olarak kullanacağız.

Aslında servodaki tüm dişlileri çıkarıp bir süre kenara koymak gerekiyor. Potansiyometreyi (bu arada, değişken bir dirençtir) kasadan bir tornavidayla servonun altından hafifçe iterek çıkarıyoruz.

Bu geri dönüşü olmayan nokta. Elbette, her şeyi geri lehimlemek her zaman mümkün olacak, ancak bu zaten daha zor. Yani - potansiyometreyi ısırır.

Daha sonra aynı şekilde kontrol panosunu güç ve sinyal kabloları ile ayırıyoruz.

Sonra motordaki kabloları ısırıyoruz. Burada, kontakları motorun kendisinden ısırmamaya dikkat edin - emin değilseniz, kabloyu bir marjla bırakmak daha iyidir. Daha sonra buharlaştırılabilir. En çok temasa kadar teli koparıyorum.


Envanter alalım.

Her şey yerinde görünüyor. Şimdi potansiyometremizi elimize alıyoruz.

Gerçek şu ki, şimdi de sadece belirli bir açıyla dönüyor. Ve eksen olduğu için ve ona, gelecekte tekerleği gerçekten takacağımız en büyük dişli takılı olduğu için, onu sürekli dönecek şekilde yapmamız gerekiyor. Bunu engelleyen iki metal plaka çıkarıyoruz. Biz alırız:

Umarım fotoğraf ne yaptığımı gösterir. Elimde daha uygun bir şey olmadığı için onu küçük bir pense ile yırttım.
Şimdi sınırlayıcıyı vitesin kendisinde kesmeniz gerekiyor. Dişlinin altından bir çıkıntıya benziyor. Bulması kolay, buna benziyor.

Biz kesiyoruz.

Ve bundan sonra, dişli kutusunu tekrar muhafazaya monte etmeye başlayabilirsiniz. Potansiyometreden daha önce yaptığımız ekseni geri koyduk.

Dahası, en küçüğünden başlayarak tek tek vites. Son dişliyi takarken dikkatli olun - eksenin ucu bir harf şeklinde yapıldığından, eski potansiyometrenin eksenine özel olarak tutturulmuştur. D... Bu çıkıntının dişlideki girintiye düşmesi gerekir. Aşağıdaki resme benzer bir şey ortaya çıkıyor.

Üst kapağı, daha fazla çalışma sırasında dağılmaması için dişli kutusuna koyarız.

Pekala, fazla bir şey kalmadı. Daha önce panodan ısırdığımız konektörlü bir kabloyu alıp içindeki kabloları ayırıyoruz. Büyük bir mesafeden bölmeye değmez, aslında bir santimetre yeterlidir.

İkisini temizliyoruz (esasen herhangi biri, ama ben kırmızı ve yeşil kullandım). Yaklaşık 3 mm izolasyonu kesmek yeterlidir. Amaçlarımız için - fazlasıyla.

Kalan soyulmamış teli bize müdahale etmemesi için basitçe büküyoruz.

Sıcak şeylere geçelim. Havyayı ısıtmanın zamanı geldi. Lehim havyasının ısındığı süre boyunca servoyu kavramada daha rahat hale getirdim.


İlk adım, motor kontaklarında kalan eski lehimin kalıntılarını çıkarmaktır. Bunu bir lehim sökme pompası kullanarak yapıyorum, teması lehim eriyecek şekilde bir havya ile ön ısıtma yapıyorum. Buradaki en önemli şey aşırıya kaçmamak - motorun arka kapağı hala plastik ve uzun süre dayanmayı sevmiyor. Süreç şuna benzer:


Yaptığım şeyin mümkün olduğunu ve pek fark edilmediğini anlıyorum, ancak istediğim kontaklarda neredeyse hiç lehim kalmadı.

DI HALT'ta lehimleme ile ilgili harika makaleler var "a. Bana göründüğü gibi genellikle bir dahi. Bloguna link, lehimlemenin yanı sıra bir çok şey var, aslında sadece arama.
Kısacası iyi bir lehim yapabilmek için her zaman önce eski lehimden kurtulmanız gerekir.
İki teli lehimlemeye devam ediyor. Lehimlemeye aşina olanlar 5 saniyede yapabilir. Benim gibi biri, hayatımda ikinci kez, normalde bir havya aldı, biraz daha zaman alacak, ama yine de - çok basit, herkes bunu yapabilir.
Lehimleme sırasında, kuşkusuz işi çok daha kolay hale getiren ve lehimleme kalitesini sağlamak çok daha kolay olan flux kullanıyorum. Şahsen, yine DI HALT'ın tavsiyesi üzerine ve blogunda LTI-120'ye aşık olmayı çoktan başardım. Böyle şık bir kavanozun içine hemen bir fırçayla koydum.

Dört vidayı sıkıyoruz.

Hepsi bu, servo rework sona erdi. Servoyu daha rahat ve daha sıkı bir şekilde kavramaya yeniden bağladıktan sonra teste başlayabilirsiniz.

Bu sefer, denetleyiciyle uğraşmayacağım, ancak 5V güç kaynağından yeşil ve kırmızı kablolara voltaj vereceğim. Dikkat, videonun sürücüden yeterince yüksek bir sesi var.
Gördüğünüz gibi, artık hiçbir şey servomuzun durmadan dönmesini engellemiyor. Sürücü tarafından üretilen ses aslında sessiz değildir, ancak prensipte tolere edilebilir. Muhtemelen bugünlük bu kadar.
Servoların genellikle 180 derecelik sınırlı bir dönüş açısı vardır. Bu durumda, sınırsız eksen dönüş açısına sahip "değiştirilmiş" bir servo düşünün. 
Satıcının sayfasından TTX
Boyut: 40 * 20 * 37,5 + 5 mm tahrik mili
ağırlık: 38g
tel uzunluğu: 320 mm
Hız: 0.19sn / 60 derece (4.8V)
0.22sn / 60 derece (6V)
hızlar büyük olasılıkla karıştırılır, servo 6 volt daha hızlı olmalıdır
tork: 5kg. santimetre. (4.8V)
5.5kg.cm.at (6V)
gerilim: 4.8V-6V
Standart teslimat seti 
Farklı şekillerde 4 rocker
Servoyu takmak için 4 burç, 4 lastik amortisör ve 4 vida
ve rocker'ı mile takmak için başka bir küçük vida fotoğraftan kaçtı :)
Görünüş güven uyandırıyor, dokunuşa hiçbir şey yok, sadece tutturma kulaklarının bölgesinde küçük kalıplar, bir çıkartma biraz eğri yapıştırılmış (totoloji evet!). Tel yumuşaktır, konektör pimlere iyi oturur. 
Şimdi otopsi:
Nasıl çalıştığını kim bilmiyordu: Servonun eksen açısını belirlediği konuma göre bir motor, bir kontrol panosu ve değişken bir direnç olması durumunda.
Bu servodaki dişli kutusu plastiktir, kaynak metalden daha azdır ve büyük yükleri sevmez. Merkezi aks için burç, bakırdan veya alaşımının bir kısmından yapılmıştır. Çıkış milinde yatak bulunmaktadır. Gres eklenebilir 
Elektrik parçası 

Dönüş yönünü ve hızını kontrol eden beyinler, değişken bir direnç ve bir elektrik motoru.
Ve şimdi dikkat, "hayat kesmek", normal bir servodan bir servo nasıl yapılır, sürekli dönüşlü bir servo 
Orijinalde değişken, ekseni ile servonun içinden çıkış şaftına yapıştırılır, değiştirilmiş şaftta montaj aşamasında ısırılmış / kırılmış gibi görünür, direnç merkezi bir konuma ayarlanır, böylece şaft hareketsiz halde dönmez. Daha ileri giderseniz, onu tamamen atabilir ve 2 özdeş sabit dirençle değiştirebilirsiniz, kontrol panosuna smd-shnoe bir şey koymak uygundur.
Toplam:
servo olarak servo, uzay değil, tüketim malları değil,
daha ucuz ve metal bir dişli ile bulunabilir
Ps
Yorumlarda doğru bir şekilde belirttiğiniz gibi, servonun nasıl kontrol edildiğini, servo 5-6 volt ve üçüncü kablo üzerinden bir ppm sinyali ile çalıştırıldığından bahsetmeyi tamamen unuttum.
En yaygın kontrol seçenekleri şunlardır:
1) güç kaynağını bir tarafa, diğer tarafa çıkışı 3 "tüketiciye" (servolar, motorlar, vb.) Güç kaynağı ve PPM sinyaline bağlarız, düğme servonun hızını ve dönüş yönünü ayarlamak için kullanılabilir
2) Alıcının çıkışlarındaki RC ekipmanı aynı ppm sinyalidir.
3) arduinka yönlendirmek
Video
Pps
Servo "modifikasyon" sonucunda geri beslemeyi kaybetti, beyinler şaftın gerçek konumunu ve dönüş yönünü bilmez, satın alacaksanız bu anı düşünün.
En basit robotlar 2 tekerlekli veya 4 tekerlekli. Böyle bir robotun temeli, radyo kontrollü bir arabanın şasisi olabilir, ancak herkesin elinde bulundurmaz veya onu içmek yazık olabilir. Şasiyi kendiniz de yapabilirsiniz, ancak tekerlekleri motora düz bir şekilde yerleştirmek çok iyi bir çözüm değildir, yavaşlamak için motorun şarj edilmesi gerekir, bunun için bir dişli kutusuna ihtiyacınız vardır. Hazır bir şasi veya dişli kutusu veya dişli kutulu bir motor almak, servo sürücülerin aksine o kadar kolay bir iş olmadığı ortaya çıktı. Hemen hemen her servo sürücü, kolayca dişli bir motora dönüştürülebilir.
Tekerlekler doğrudan böyle bir motorun sallanan koltuğuna yapıştırılabilir ve servo kasası montaj için uygundur.
DİKKAT! Diğer servoların tasarımı farklılık gösterebilir ve bu nedenle bu kılavuz sadece kısmen benzerdir.
En basit ve en ucuz servo esas alındı:

İlk önce onu parçalara ayırıyoruz.

İlk olarak, gereksiz elektronikleri kaldırıyoruz, sürücüyü ısırıyoruz ve motoru doğrudan kontrol ediyoruz. Daha sonra, mekaniğin modifikasyonuna geçiyoruz, ilk vitesi harici bir şaftla çıkarıyoruz ve hareket durdurucusunu ondan kaldırıyoruz.



Direnci çıkarıyoruz ve vücudunda bulunan sınırlayıcıyı ısırıyoruz.

Tüm mekaniği geri koyuyoruz ve her şeyin yolunda gidip gitmediğini kontrol ediyoruz.
Bir sonraki adım, teli motora lehimlemektir.

Eski servoyu şanzımanlı yeni bir motora yerleştirmek.
Her şey hazır, eğer hata yapmadıysanız işinizin tadını çıkarabilirsiniz.
Bu makale servoları tartışmaktadır: yapıları, amaçları, bağlanma ve kontrol etme ipuçları, servo türleri ve karşılaştırmaları. Başlayalım ve servonun ne olduğu ile başlayalım.
Servo sürücü konsepti
Bir servo sürücü, genellikle belirli bir açıya dönmesi ve bu konumu tutması istenebilen bir elektrik motorlu bir mekanizma olarak anlaşılır. Ancak bu tam bir tanım değildir.
Daha genel olarak, bir servo, hareket parametrelerinin hassas kontrolüne izin veren negatif geri besleme kontrollü bir sürücüdür. Servo sürücü, bir sensör (konum, hız, kuvvet vb.) Ve sensör ve cihaz üzerinde gerekli parametreleri belirtilen harici değere göre otomatik olarak koruyan bir sürücü kontrol ünitesi içeren herhangi bir mekanik sürücü türüdür.
Başka bir deyişle:
Servo sürücü, kontrol parametresinin değerini girdi olarak alır. Örneğin, dönme açısı.
Kontrol ünitesi, bu değeri sensöründeki değerle karşılaştırır.
Karşılaştırma sonucuna göre sürücü, dahili sensörden gelen değerin harici kontrol parametresinin değerine olabildiğince yakın olması için döndürme, hızlanma veya yavaşlama gibi bazı eylemler gerçekleştirir.
Belirli bir açıyı koruyan en yaygın servolar ve belirli bir dönme hızını koruyan servolar.
Tipik bir hobi servosu aşağıda gösterilmiştir.
Servolar nasıl düzenlenir?
Servo cihazı
Servoların birkaç bileşeni vardır.

Sürücü, dişli kutulu bir elektrik motorudur. Elektriği mekanik rotasyona dönüştürmek için ihtiyacınız olan elektrik motoru... Bununla birlikte, motor hızı pratik kullanım için genellikle çok yüksektir. Hızı azaltmak için kullanın redüktör: torku ileten ve dönüştüren bir dişli mekanizması.
Elektrik motorunu açıp kapatarak, kontrol etmek istediğimiz bir şeyi takabileceğimiz son servo dişli olan çıkış milini döndürebiliriz. Ancak pozisyonun cihaz tarafından kontrol edilebilmesi için, geribildirim sensörü - kodlayıcıdönme açısını elektrik sinyaline geri dönüştürecektir. Bunun için genellikle bir potansiyometre kullanılır. Potansiyometre kaydırıcısını çevirdiğinizde, dönüş açısı ile orantılı olarak direnci değişir. Böylece mekanizmanın mevcut konumunu ayarlamak için kullanılabilir.
Elektrik motoru, dişli kutusu ve potansiyometreye ek olarak, servo sürücünün harici bir parametre almaktan, bir potansiyometreden değerleri okumaktan, bunları karşılaştırmaktan ve motoru açıp kapatmaktan sorumlu olan elektronik bir dolgusu vardır. Olumsuz geri bildirimleri sürdürmekten sorumludur.
Servoya giden üç kablo var. Bunlardan ikisi motora güç sağlamaktan sorumludur, üçüncüsü, cihazın konumunu ayarlamak için kullanılan bir kontrol sinyali verir.
Şimdi servoyu dışarıdan nasıl kontrol edeceğimize bakalım.
Servo kontrolü. Kontrol sinyali arayüzü
Servoya istenen konumu belirtmek için, belirlenen kablo üzerinden bir kontrol sinyali gönderilmelidir. Kontrol sinyali, sabit frekanslı ve değişken genişlikte darbelerdir.

Servonun hangi pozisyonda alması gerektiği, darbelerin uzunluğuna bağlıdır. Kontrol devresine bir sinyal girdiğinde, içindeki puls üreteci, süresi bir potansiyometre ile belirlenen kendi darbesini üretir. Devrenin başka bir kısmı, iki darbenin süresini karşılaştırır. Süre farklı ise elektrik motoru açılır. Dönme yönü, hangi darbenin daha kısa olduğuna göre belirlenir. Darbe uzunlukları eşitse motor durur.
Çoğu zaman hobi serflerinde, bakliyat 50 Hz frekansında üretilir. Bu, her 20 ms'de bir puls verildiği ve alındığı anlamına gelir. Tipik olarak, 1520 μs'lik bir darbe süresi, servonun orta konumda olması gerektiği anlamına gelir. Darbe uzunluğunun artırılması veya azaltılması, servonun sırasıyla saat yönünde veya saat yönünün tersine dönmesine neden olacaktır. Bu durumda, darbe süresinin üst ve alt sınırları vardır. Arduino için Servo kitaplığında, aşağıdaki darbe uzunlukları varsayılan olarak ayarlanır: 0 ° için 544 μs ve 180 ° için 2400 μs.
Lütfen özel cihazınızın farklı fabrika ayarlarına sahip olabileceğini unutmayın. Bazı servolar 760 μs darbe genişliği kullanır. Bu durumda, orta konum 760 µs'ye karşılık gelir, geleneksel servolarda olduğu gibi, orta konum 1520 µs'ye karşılık gelir.
Bunların sadece yaygın uzunluklar olduğunu da belirtmek gerekir. Aynı servo modeli içinde bile, biraz farklı bir darbe uzunluğu çalışma aralığı ile sonuçlanan üretim toleransları olabilir. Doğru çalışma için, her bir servo kalibre edilmelidir: deneyler yoluyla, onun özelliği olan doğru aralığı seçmek gerekir.
Belirtilmeye değer başka bir şey terminolojideki kafa karışıklığıdır. Servoları kontrol etmenin yolu genellikle PWM / PWM (Darbe Genişliği Modülasyonu) veya PPM (Darbe Konum Modülasyonu) olarak adlandırılır. Durum böyle değildir ve bu yöntemleri kullanmak sürücüye bile zarar verebilir. Doğru terim PDM'dir (Darbe Süresi Modülasyonu). İçinde darbelerin uzunluğu son derece önemlidir ve oluşumlarının sıklığı o kadar önemli değildir. 50Hz tamam, ancak servo hem 40 hem de 60Hz'de doğru şekilde çalışacaktır. Bu durumda akılda tutulması gereken tek şey, frekansta güçlü bir düşüşle, sarsıntılar halinde ve düşük bir güçte çalışabileceği ve frekansın güçlü bir şekilde aşırı tahmin edilmesiyle (örneğin, 100 Hz) aşırı ısınabilir ve başarısız olabilir.
Servo özellikleri
Şimdi ne tür servoların olduğunu ve hangi özelliklere sahip olduklarını bulalım.
Tork ve dönüş hızı
İlk olarak, bir servonun çok önemli iki özelliğinden bahsedelim: tork ve hakkında dönüş hızı.
Kuvvet momenti veya tork, bu kuvvetin vektörü tarafından kuvvetin uygulama noktasına dönme ekseninden çizilen yarıçap vektörünün ürününe eşit bir vektör fiziksel miktarıdır. Katı cisim üzerindeki bir kuvvetin dönme hareketini karakterize eder.

Basit bir ifadeyle, bu özellik, bir servonun belirli bir uzunluktaki bir kaldıraç üzerinde dururken ne kadar ağır bir yükü tutabileceğini gösterir. Servonun torku 5 kg × cm ise, bu, servonun 5 kg askıya alınmış serbest ucunda yatay olarak 1 cm uzunluğunda bir kolu tutacağı anlamına gelir. Veya eşdeğer olarak, 1 kg askıya alınmış 5 cm uzunluğunda bir kol.
Servo hızı, servo kolun 60 ° dönmesi için geçen süre ile ölçülür. 0.1 s / 60 ° özelliği, servonun 0.1 saniyede 60 ° döneceği anlamına gelir. Ondan hızı daha tanıdık bir değerde, dakika başına devirlerde hesaplamak kolaydır, ancak öyle oldu ki, servoları tanımlarken, böyle bir birim en sık kullanılır.
Bazen bu iki özellik arasında bir uzlaşma bulmamız gerektiğini belirtmek gerekir, çünkü eğer güvenilir, ağır ağırlıklı bir servo istiyorsak, o zaman bu güçlü teçhizatın yavaşça dönmesi için hazırlıklı olmamız gerekir. Ve eğer çok hızlı bir sürüş istiyorsak, onu dengeden çıkarmak nispeten kolay olacaktır. Aynı motoru kullanırken denge, dişli kutusundaki dişlilerin konfigürasyonu ile belirlenir.
Tabii ki, her zaman çok fazla güç tüketen bir kurulum alabiliriz, asıl mesele, özelliklerinin ihtiyaçlarımızı karşılamasıdır.
Form faktörü
Servolar boyut olarak değişir. Ve resmi bir sınıflandırma olmamasına rağmen, üreticiler, genel olarak kabul edilen bağlantı elemanları düzenlemesiyle uzun süredir çeşitli boyutlara bağlı kalmıştır. Aşağıdakilere ayrılabilirler:
küçük
standart
Aynı zamanda aşağıdaki karakteristik boyutlara sahiptirler:
Bu sınıflandırmaya girmeyen boyutlara sahip sözde "özel tip" servolar da vardır, ancak bu tür servoların yüzdesi çok küçüktür.
Dahili arayüz
Servolar analog ve dijital olabilir. Öyleyse farklılıkları, avantajları ve dezavantajları nelerdir?
Dışa doğru, farklı değiller: elektrik motorları, dişli kutuları, potansiyometreleri aynı, sadece dahili kontrol elektroniklerinde farklılık gösteriyorlar. Analog bir servo sürücü için özel bir mikro devre yerine, kart üzerinde, darbeleri alan, bunları analiz eden ve motoru kontrol eden bir mikro işlemci görülebilir. Bu nedenle, fiziksel performansta tek fark, dürtüleri işleme ve motoru kontrol etme yöntemindedir.

Her iki servo türü de aynı kontrol darbelerini alır. Analog servo daha sonra konumun değiştirilmesi gerekip gerekmediğine karar verir ve gerekirse motora bir sinyal gönderir. Bu genellikle 50 Hz frekansla olur. Böylece, minimum yanıt süresi olan 20 ms elde ederiz. Şu anda, herhangi bir dış etki servonun konumunu değiştirebilir. Ancak tek sorun bu değil. Dinlenme durumunda elektrik motoruna voltaj uygulanmaz; dengeden hafif bir sapma olması durumunda elektrik motoruna kısa bir düşük güç sinyali gönderilir. Sapma ne kadar büyükse sinyal o kadar güçlüdür. Bu nedenle, küçük sapmalarla servo, motoru hızlı bir şekilde döndüremeyecek veya büyük bir tork geliştiremeyecektir. Zaman ve mesafe içinde "ölü bölgeler" oluşur.
Bu sorunlar, alma frekansı, sinyal işleme ve motor kontrolünün artırılmasıyla çözülebilir. Dijital servo sürücüler, kontrol darbelerini alan, bunları işleyen ve motora 200 Hz veya daha yüksek frekansla sinyaller gönderen özel bir işlemci kullanır. Dijital servonun dış etkilere daha hızlı tepki verebildiği, gerekli hızı ve torku daha hızlı geliştirebildiği ortaya çıktı, bu da belirli bir konumu tutmanın daha iyi olduğu anlamına geliyor ki bu iyi. Tabii ki daha fazla elektrik tüketiyor. Ayrıca, dijital servoların üretimi daha zordur ve bu nedenle maliyeti önemli ölçüde daha yüksektir. Aslında, bu iki dezavantaj, dijital servoların sahip olduğu tüm dezavantajlardır. Teknik olarak, analog servoları koşulsuz olarak yenerler.
Dişli malzemeleri
Servo dişliler çeşitli malzemelerden üretilir: plastik, karbon, metal. Hepsi yaygın olarak kullanılmaktadır, seçim belirli göreve ve kurulumda hangi özelliklerin gerekli olduğuna bağlıdır.

Plastik, çoğunlukla naylon, dişliler çok hafiftir, yıpranmaz ve en çok servolarda yaygındır. Ağır yüklere dayanamazlar, ancak yüklerin küçük olması gerekiyorsa, naylon dişliler en iyi seçimdir.
Karbon dişliler daha dayanıklıdır, pratik olarak aşınmazlar ve naylon dişlilerden birkaç kat daha güçlüdür. Ana dezavantaj, yüksek maliyettir.
Metal dişliler en ağır olanıdır, ancak maksimum yükleri kaldırabilirler. Neredeyse her mevsim vites değiştirmeniz gerekecek kadar çabuk aşınırlar. Titanyum dişliler, hem performans hem de fiyat açısından metal dişliler arasında favoridir. Maalesef size çok pahalıya mal olacaklar.
Fırçasız ve fırçasız motorlar
Üç tür servo motor vardır: normal çekirdekli motor, çekirdeksiz motor ve fırçasız motor.

Geleneksel bir çekirdek motor (sağda), etrafına telle sarılmış ve mıknatıslanmış yoğun bir demir rotora sahiptir. Rotorun birden fazla bölümü vardır, bu nedenle motor döndükçe rotor, bölümler mıknatıslardan geçerken motorun hafifçe titreşmesine neden olur, bu da titreşen ve çekirdeksiz motorlu bir servodan daha az hassas olan bir servo ile sonuçlanır. İçi boş rotorlu motor (solda), bir mıknatısın etrafına sarılmış bir silindir veya çan ile tek bir manyetik çekirdeğe sahiptir. Çekirdeksiz tasarım, ağırlık olarak daha hafiftir ve kesitleri yoktur, bu da daha hızlı yanıt ve daha sorunsuz titreşimsiz çalışma sağlar. Bu motorlar daha pahalıdır ancak standart motorlardan daha yüksek kontrol, tork ve hız seviyeleri sunar.

Fırçasız servolar nispeten yenidir. Avantajları diğer fırçasız motorlarla aynıdır: Fırçalar yoktur, yani dönmeye karşı direnç oluşturmazlar ve aşınmazlar, akım tüketimi kollektör motorlarına eşit olduğunda hız ve tork daha yüksektir. Fırçasız servolar en pahalı servolardır, ancak diğer motor türlerine sahip servolardan daha iyi performans sunarlar.
Arduino'ya bağlanma
Birçok servo doğrudan Arduino'ya bağlanabilir. Bunu yapmak için, onlardan üç telli bir tren gider:
kırmızı - yemek; 5V pinine veya doğrudan güç kaynağına bağlanır
kahverengi veya siyah - toprak
sarı veya beyaz - sinyal; Arduino dijital çıkışına bağlanır.
Arduino'ya bağlanmak için Troyka Shield gibi bir port genişletici kart kullanmak uygun olacaktır. Birkaç ekstra kablo olmasına rağmen, servoyu breadboard üzerinden veya doğrudan Arduino pinlerine bağlayabilirsiniz.
Kontrol darbelerini kendiniz üretmek mümkündür, ancak bu o kadar yaygın bir görevdir ki, Servo standart kitaplığı onu basitleştirmek için mevcuttur.
Gıda kısıtlaması
Yaygın bir hobi servosu, çalışma sırasında 100mA'dan fazla çeker. Arduino aynı zamanda 500 mA'ya kadar teslim etme kapasitesine sahiptir. Bu nedenle, projenizde güçlü bir servo kullanmanız gerekiyorsa, onu ek güce sahip bir devreye tahsis etmeyi düşünmek mantıklıdır.
12V servo bağlama örneğini ele alalım: 
Bağlı servo sayısında sınırlama
Çoğu Arduino kartında, Servo kütüphanesi maksimum 12 servoyu destekler, Arduino Mega üzerinde bu sayı 48'e yükselir. Ancak, bu kütüphaneyi kullanmanın küçük bir yan etkisi vardır: bir Arduino Mega ile çalışmıyorsanız, analogWrite () fonksiyonunu kullanmak imkansız hale gelir. Servoların bu pinlere bağlı olup olmadığına bakılmaksızın 9 ve 10 pin. Arduino Mega'ya PWM / PWM işlemini kesintiye uğratmadan 12 adede kadar servo bağlanabilir, daha fazla servo ile 11 ve 12 pinlerinde analogWrite () kullanamayız.
Servo kütüphane işlevi
Servo kitaplığı, servo sürücülerin yazılım kontrolüne izin verir. Bunun için Servo tipinde bir değişken kurulur. Yönetim aşağıdaki işlevlerle gerçekleştirilir:
attach () - belirli bir pime bir değişken ekler. Bu işlev için iki sözdizimi mevcuttur: servo.attach (pin) ve servo.attach (pin, min, max). Bu durumda pin, servonun bağlı olduğu pinin numarasıdır, min ve max, 0 ° ve 180 ° dönme açılarından sorumlu olan mikrosaniye cinsinden darbe uzunluklarıdır. Varsayılan olarak, sırasıyla 544 μs ve 2400 μs'ye eşit olarak ayarlanmıştır.
write () - servoya bazı parametre değerlerini kabul etmesini söyler. Sözdizimi servo.write (açı) şeklindedir, burada açı, servonun dönmesi gereken açıdır.
writeMicroseconds () - servoya belirli bir uzunluk gönderme komutu verir, önceki komutun düşük seviyeli bir analogudur. Sözdizimi servo.writeMicroseconds (uS) şeklindedir, burada uS, mikrosaniye cinsinden darbe uzunluğudur.
read () - servonun içinde bulunduğu açının mevcut değerini okur. Sözdizimi servo.read () şeklindedir ve 0 ile 180 arasında bir tamsayı değeri döndürülür.
ekli () - değişkenin belirli bir pime eklenip eklenmediğini kontrol edin Sözdizimi servo.attached () olup, değişken herhangi bir pime eklenmişse boolean, aksi takdirde false döndürür.
detach () - attach () işleminin tersini gerçekleştirir, yani bir değişkeni bağlı olduğu pinden ayırır. Sözdizimi servo.detach () şeklindedir.
Tüm Servo2 kütüphane yöntemleri, Servo yöntemleriyle aynıdır.
Servo kütüphanesinin kullanımına bir örnek
Bir sonuç yerine
Servolar farklıdır, bazıları daha iyidir - diğerleri daha ucuz, bazıları daha güvenilir - diğerleri daha doğrudur. Ve bir servo satın almadan önce, projenize uygun olduğu sürece en iyi performansa sahip olmayabileceğini unutmayın. Çabalarınızda iyi şanslar!
Bu yazımızda Arduino projelerindeki servolardan bahsedeceğiz. Geleneksel elektronik projelerin robotik hale gelmesi servo motorlar sayesinde olur. Bir servoyu bir Arduino projesine bağlamak, sensör sinyallerine bazı hassas hareketlerle tepki vermenize, örneğin kapıyı açmanıza veya sensörleri istenen yönde çevirmenize olanak tanır. Makale, servo sürücüleri kontrol etme konularını, bir servoyu bir arduino'ya bağlamak için olası şemaları ve çizim örneklerini tartışıyor.
Servo, hareket parametrelerini hassas bir şekilde kontrol edebilen bir aktüatör türüdür. Yani milini belirli bir açıda döndürebilen veya belirli bir periyotta sürekli dönüşü koruyabilen bir motordur.
Servo sürücü şeması, geri bildirim kullanımına dayanır (giriş ve çıkış sinyallerinin eşleşmediği kapalı döngü bir döngü). Herhangi bir tür mekanik sürücü, bir sensör ve sensör üzerinde ayarlanan tüm parametreleri otomatik olarak koruyan bir kontrol ünitesi içeren bir servo sürücü olarak işlev görebilir. Servo yapısı bir motor, bir konumlandırma sensörü ve bir kontrol sisteminden oluşur. Bu tür cihazların ana görevi, servo mekanizmalar alanında uygulanmasıdır. Ayrıca, servo sürücüler genellikle malzeme taşıma, nakliye ekipmanı imalatı, ahşap işleme, sac metal üretimi, inşaat malzemeleri üretimi ve diğerleri gibi alanlarda kullanılır.
Arduino robotik projelerinde, servo genellikle en basit mekanik eylemler için kullanılır:
- Robotun dar bir görüş alanındaki mesafeyi ölçmek için telemetreyi veya diğer sensörleri belirli bir açıya döndürün.
- Ayağınızla küçük bir adım atın, uzuvunuzu veya başınızı hareket ettirin.
- Robotik manipülatörler oluşturmak için.
- Direksiyon mekanizmasını uygulamak için.
- Bir kapıyı, kanadı veya başka bir nesneyi açın veya kapatın.
Elbette gerçek projelerde servo uygulama kapsamı çok daha geniştir, ancak verilen örnekler en popüler şemalardır.
Şema ve servo türleri

Bir servonun çalışma prensibi, bir veya daha fazla sistem sinyalinden gelen geri bildirime dayanır. Çıkış göstergesi, değerinin referans eylemle karşılaştırıldığı ve gerekli eylemlerin gerçekleştirildiği girişe beslenir - örneğin, motor kapatılır. En basit uygulama, bir şaft tarafından kontrol edilen değişken bir dirençtir - direncin parametreleri değiştiğinde, motoru besleyen akımın parametreleri değişir.
Gerçek servo sürücülerde, kontrol mekanizması çok daha karmaşıktır ve yerleşik kontrolörler kullanır. Kullanılan geri bildirim mekanizmasının türüne bağlı olarak, analog ve dijital servolar. İlki, potansiyometreye benzeyen bir şey kullanır, ikincisi ise denetleyicileri kullanır.
 Servo kontrol devresinin tamamı mahfazanın içinde bulunur, kontrol sinyalleri ve güç, kural olarak üç kabloyla sağlanır: toprak, besleme voltajı ve kontrol sinyali.
Servo kontrol devresinin tamamı mahfazanın içinde bulunur, kontrol sinyalleri ve güç, kural olarak üç kabloyla sağlanır: toprak, besleme voltajı ve kontrol sinyali.
360, 180 ve 270 derece sürekli dönüş servo
İki ana tip servo motor vardır - sürekli dönüşlü ve sabit açılı (çoğunlukla 180 veya 270 derece). Sınırlı dönüş servosu arasındaki fark, şaftın belirtilen açıların dışında hareketini engelleyebilen yapının mekanik elemanlarında yatmaktadır. 180 derecelik bir açıya ulaşan şaft, sınırlayıcı üzerinde hareket edecek ve motoru kapatmak için bir komut verecektir. Sürekli servo motorlarda bu tür sınırlayıcılar yoktur.
Servo Dişli Malzemeleri
Çoğu servoda, şaft ve dış elemanlar arasındaki bağlantı bir dişlidir, bu nedenle hangi malzemeden yapıldığı çok önemlidir. En uygun fiyatlı seçenekler ikidir: metal veya plastik dişliler. Daha pahalı modellerde karbon ve hatta titanyumdan yapılmış elementler bulabilirsiniz.


Plastik varyantlar doğal olarak daha ucuzdur, üretimi daha kolaydır ve genellikle düşük maliyetli servo modellerinde kullanılır. Eğitim projeleri için, servo birkaç hareket yaptığında, bu çok önemli değil. Ancak ciddi projelerde, bu tür dişlilerin yük altında çok hızlı aşınması nedeniyle plastik kullanımı imkansızdır.
 Metal dişliler daha güvenilirdir, ancak bu kesinlikle modelin hem fiyatını hem de ağırlığını etkiler. Tasarruflu üreticiler bazı parçaları plastik ve bazılarını metal yapabilir, bu da akılda tutulmalıdır. Ve elbette, en ucuz modellerde, bir metal dişlinin varlığı bile bir kalite garantisi değildir.
Metal dişliler daha güvenilirdir, ancak bu kesinlikle modelin hem fiyatını hem de ağırlığını etkiler. Tasarruflu üreticiler bazı parçaları plastik ve bazılarını metal yapabilir, bu da akılda tutulmalıdır. Ve elbette, en ucuz modellerde, bir metal dişlinin varlığı bile bir kalite garantisi değildir.
Bütçeniz yoksa titanyum veya karbon dişliler tercih edilen seçenektir. Hafif ve güvenilir olan bu tür servolar, otomobil, dron ve uçak modelleri oluşturmak için yaygın olarak kullanılmaktadır.
Servo motorların faydaları
Servo sürücülerin yaygın kullanımı, kararlı çalışma, yüksek parazit direnci, küçük boyutlar ve geniş bir hız kontrolü yelpazesine sahip olmalarından kaynaklanmaktadır. Servo sürücülerin önemli özellikleri, gücü artırma ve bilgi geri bildirimi sağlama yeteneğidir. Ve bunu, ileri yönde, devrenin bir enerji ileticisi olduğu ve ters yönde, kontrol doğruluğunu iyileştirmek için kullanılan bir bilgi ileticisi olduğunu izler.
Servo ve geleneksel motor arasındaki farklar
Geleneksel bir elektrik motorunu açıp kapatarak, bir dönme hareketi oluşturabilir ve mile bağlı tekerlekleri veya diğer nesneleri hareket ettirebiliriz. Bu hareket sürekli olacaktır, ancak şaftın hangi açıda döndüğünü veya kaç devir yaptığını anlamak için ek harici elemanlar kurmak gerekecektir: enkoderler. Servo sürücü, mevcut dönme parametreleri hakkında bilgi almak için ihtiyaç duyduğunuz her şeyi zaten içerir ve şaft gerekli açıya döndüğünde kendini kapatabilir.
Servo ve step motor arasındaki farklar
 Bir servo motor ve bir step motor arasındaki önemli bir fark, yüksek hızlanmalarda ve değişken yük altında çalışma yeteneğidir. Ayrıca servo motorlar daha güçlüdür. Step motorların geri beslemesi yoktur, bu nedenle kademe kaybının etkisi gözlemlenebilir, servo motorlarda kademe kaybı hariçtir - tüm ihlaller kaydedilecek ve düzeltilecektir. Tüm bu açık avantajlarla servo motorlar, step motorlardan daha pahalıdır, daha karmaşık kablolama ve kontrol sistemlerine sahiptir ve daha kaliteli bakım gerektirir. Step motorların ve servoların doğrudan rakip olmadığına dikkat etmek önemlidir - bu cihazların her birinin kendi özel uygulaması vardır.
Bir servo motor ve bir step motor arasındaki önemli bir fark, yüksek hızlanmalarda ve değişken yük altında çalışma yeteneğidir. Ayrıca servo motorlar daha güçlüdür. Step motorların geri beslemesi yoktur, bu nedenle kademe kaybının etkisi gözlemlenebilir, servo motorlarda kademe kaybı hariçtir - tüm ihlaller kaydedilecek ve düzeltilecektir. Tüm bu açık avantajlarla servo motorlar, step motorlardan daha pahalıdır, daha karmaşık kablolama ve kontrol sistemlerine sahiptir ve daha kaliteli bakım gerektirir. Step motorların ve servoların doğrudan rakip olmadığına dikkat etmek önemlidir - bu cihazların her birinin kendi özel uygulaması vardır.
Popüler Servo SG90, MG995, MG996 Nereden Alınır
 En Uygun Fiyatlı SG90 1.6KG Servo Seçeneği En Uygun Fiyatlı SG90 1.6KG Servo Seçeneği
|
 Arduino için Servolar SG90 ve MG90S 70 ruble'nin altındaki bir fiyata Arduino için Servolar SG90 ve MG90S 70 ruble'nin altındaki bir fiyata
|
 Ali'deki güvenilir bir tedarikçiden SG90 Pro 9g servo'nun başka bir versiyonu Ali'deki güvenilir bir tedarikçiden SG90 Pro 9g servo'nun başka bir versiyonu
|
 Güvenilir tedarikçi RobotDyn'den Servo SG90 Güvenilir tedarikçi RobotDyn'den Servo SG90
|
 Servo test cihazı Servo test cihazı
|
 Servo test cihazları için çeşitli seçenekler Servo test cihazları için çeşitli seçenekler
|
 15 kg tork ile korumalı servo 15 kg tork ile korumalı servo
|
 Servo JX DC5821LV 21KG Tam su geçirmez Çekirdek zihinsel dişli 1/8 1/10 RC araba Ölçekleyici Buggy Paletli TRAXXAS RC4WD TRX-4 SCX10 D90 Servo JX DC5821LV 21KG Tam su geçirmez Çekirdek zihinsel dişli 1/8 1/10 RC araba Ölçekleyici Buggy Paletli TRAXXAS RC4WD TRX-4 SCX10 D90
|
 Servo MG996R MG996 Futaba JR için Servo Metal Dişli Servo MG996R MG996 Futaba JR için Servo Metal Dişli
|
 Servo 13KG 15KG Servolar Dijital MG995 MG996 MG996R Servo Metal Dişli Servo 13KG 15KG Servolar Dijital MG995 MG996 MG996R Servo Metal Dişli
|
 Servo sürücülerin kontrolünde belirleyici bir faktör, sabit bir frekans ve değişken genişlik darbeleri olan kontrol sinyalidir. Darbe uzunluğu, servonun konumunu belirleyen en önemli parametrelerden biridir. Bu uzunluk, bir açıyla seçim yöntemiyle veya kitaplık komutları kullanılarak programda manuel olarak ayarlanabilir. Uzunluk, her cihaz markası için değişebilir.
Servo sürücülerin kontrolünde belirleyici bir faktör, sabit bir frekans ve değişken genişlik darbeleri olan kontrol sinyalidir. Darbe uzunluğu, servonun konumunu belirleyen en önemli parametrelerden biridir. Bu uzunluk, bir açıyla seçim yöntemiyle veya kitaplık komutları kullanılarak programda manuel olarak ayarlanabilir. Uzunluk, her cihaz markası için değişebilir.
Sinyal kontrol devresine girdiğinde, jeneratör, süresi bir potansiyometre kullanılarak belirlenen impulsunu verir. Devrenin başka bir bölümünde, uygulanan sinyalin süresi ile jeneratörden gelen sinyal karşılaştırılır. Bu sinyaller farklı sürelerde ise, dönme yönü darbelerden hangisinin daha kısa olduğu ile belirlenen bir elektrik motoru çalıştırılır. Darbe uzunluğu eşitse motor durur.
 Darbelerin gönderildiği standart frekans 50 Hz'dir, yani her 20 milisaniyede 1 darbe. Bu değerlerde süre 1520 mikrosaniyedir ve servo orta konumdadır. Darbe uzunluğunun değiştirilmesi, servonun dönüşüne yol açar - süre arttıkça, dönüş saat yönünde, düşüşle - saat yönünün tersine gerçekleştirilir. Süre sınırları vardır - 0 ° için Servo kütüphanesinde Arduino'da darbe değeri 180 ° - 2400 μs (üst sınır) için 544 μs (alt sınır) olarak ayarlanır.
Darbelerin gönderildiği standart frekans 50 Hz'dir, yani her 20 milisaniyede 1 darbe. Bu değerlerde süre 1520 mikrosaniyedir ve servo orta konumdadır. Darbe uzunluğunun değiştirilmesi, servonun dönüşüne yol açar - süre arttıkça, dönüş saat yönünde, düşüşle - saat yönünün tersine gerçekleştirilir. Süre sınırları vardır - 0 ° için Servo kütüphanesinde Arduino'da darbe değeri 180 ° - 2400 μs (üst sınır) için 544 μs (alt sınır) olarak ayarlanır.

(Amperka.ru'dan kullanılmış resim)
Belirli bir cihazdaki ayarların genel olarak kabul edilen değerlerden biraz farklı olabileceğini hesaba katmak önemlidir. Bazı cihazlar için ortalama konum ve darbe genişliği 760 μs'ye eşit olabilir. Cihazın üretimi sırasında yapılabilecek hatalar nedeniyle kabul edilen tüm değerler biraz farklılık gösterebilir.
Sürücü kontrol yöntemi genellikle yanlışlıkla PWM / PWM olarak adlandırılır, ancak bu tamamen doğru değildir. Kontrol doğrudan darbe uzunluğuna bağlıdır, oluşumlarının sıklığı o kadar önemli değildir. Hem 40 Hz hem de 60 Hz'de doğru çalışma sağlanacaktır, yalnızca frekansta güçlü bir azalma veya artış katkıda bulunacaktır. Keskin bir düşüş durumunda, servo sarsıntılarla çalışmaya başlayacaktır; frekans 100 Hz'nin üzerinde fazla tahmin edilirse, cihaz aşırı ısınabilir. Bu nedenle PDM olarak adlandırmak daha doğrudur.
Dahili arayüz analog ve dijital servolara bölünebilir. Dış farklılıklar yoktur - tüm farklılıklar yalnızca dahili elektroniklerde bulunur. Analog bir servo sürücü, içinde özel bir mikro devre içerir, dijital olanı - darbeleri alan ve analiz eden bir mikroişlemci.

Bir sinyal alırken, analog servo pozisyonu değiştirip değiştirmemeye karar verir ve gerekirse motora 50 Hz frekanslı bir sinyal gönderir. Tepki süresi (20 ms) sırasında, servonun konumunu değiştirecek dış etkiler meydana gelebilir ve cihazın tepki verme zamanı olmayacaktır. Dijital bir servo sürücü, 200 Hz'den daha yüksek frekanslı sinyaller gönderen ve işleyen bir işlemci kullanır, böylece harici etkilere daha hızlı tepki verebilir, gerekli hızı ve torku daha hızlı geliştirebilir. Bu nedenle, dijital servo ayar konumunu daha iyi tutacaktır. Bununla birlikte, dijital servo, çalışması için daha fazla güce ihtiyaç duyar ve bu da maliyeti artırır. Üretimlerinin karmaşıklığı da fiyata büyük katkı sağlıyor. Yüksek maliyet, dijital servoların tek dezavantajıdır, teknik olarak analog cihazlardan çok daha iyidirler.
Servo motoru arduino'ya bağlama
Servo, farklı renkte üç kontağa sahiptir. Kahverengi kablo toprağa, kırmızı kablo + 5V güç kaynağına, turuncu veya sarı kablo ise sinyal kablosudur. Cihaz, şekilde gösterildiği gibi devre tahtası üzerinden Arduino'ya bağlanır. Turuncu tel (sinyal) dijital pime, siyah ve kırmızı teller sırasıyla toprağa ve güce bağlanır. Servo motoru kontrol etmek için, PWM pinlerine bağlanmak gerekli değildir - daha önce servo kontrol prensibini daha önce tanımlamıştık.
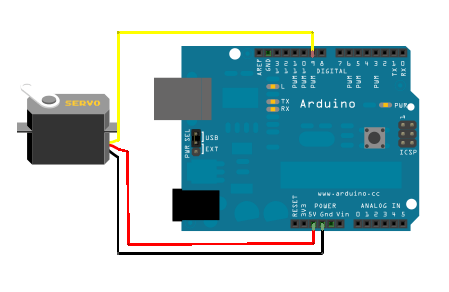
Güçlü servoları doğrudan karta bağlamanız önerilmez, çünkü Arduino güç devresi için yaşamla uyumlu olmayan bir akım yaratırlar - eğer koruma çalışırsa şanslılar. Servo aşırı yükünün ve uygun olmayan güç kaynağının en yaygın belirtileri servo sarsıntısı, rahatsız edici ses ve kartın yeniden başlatılmasıdır. Güç kaynağı için harici kaynaklar kullanmak daha iyidir, iki devrenin topraklarını birleştirdiğinizden emin olun.
Arduino'da bir servoyu kontrol etmek için çizim
Çizimdeki darbe genişliğini değiştirerek servoyu doğrudan kontrol etmek oldukça önemsiz bir iştir, ancak neyse ki Arduino geliştirme ortamında yerleşik harika bir Servo kitaplığımız var. Servolarla programlama ve çalışmanın tüm nüanslarını ayrı bir makalede ele alacağız. İşte Servo kullanmanın en basit örneği.
İş algoritması basittir:
- İlk olarak, Servo.h'yi ekliyoruz
- Servo sınıfının bir nesnesini oluşturun
- Kurulum bloğunda, servonun hangi pime bağlı olduğunu belirtin
- Nesne yöntemlerini normal C ++ yöntemiyle kullanıyoruz. En popüler olanı, derece cinsinden bir tamsayı değeri verdiğimiz yazma yöntemidir (bir servo 360 için bu değerler farklı şekilde yorumlanacaktır).
Bir servo ile çalışmak için basit bir eskiz örneği
Hemen servo motoru sıfır açıya ayarladığımız ve ardından 90 derece döndürdüğümüz bir proje örneği.
#Dahil etmek
İki servo için çizim
Ve bu örnekte aynı anda iki servo ile çalışıyoruz:
#Dahil etmek
Potansiyometreli servo kontrol
Bu örnekte, potansiyometreden elde edilen değere bağlı olarak servoyu döndürüyoruz. Değeri okuruz ve harita işlevini kullanarak onu bir açıya dönüştürürüz:
// Servo kütüphanesi kullanmanın standart bir örneğinin parçası void loop () (val \u003d analogRead (A0); // Potansiyometrenin bağlı olduğu pinden değeri okuyun val \u003d map (val, 0, 1023, 0, 180); // Sayıyı dönüştürün 0 ile 1023 aralığında yeni bir 0 ile 180 aralığında. servo.write (val); gecikme (15);)

Özellikler ve Bağlantılar SG-90
En ucuz ve en basit servoyu satın almak istiyorsanız, SG 90 en iyi seçim olacaktır Bu servo, genellikle 0 ° ile 180 ° dönüşe sahip küçük, hafif makineleri kontrol etmek için kullanılır.
Teknik Özellikler SG90:
- Komut işleme hızı 0.12s / 60 derece;
- Güç 4.8V;
- -30C ile 60C arası çalışma sıcaklıkları;
- Boyutlar 3,2 x 1,2 x 3 cm;
- Ağırlık 9 gr.
Tanım SG90
Tel renkleri standarttır. Servo ucuzdur ve başlangıç \u200b\u200bve bitiş konumlarında hassas ayarlamalar sağlamaz. 0 ve 180 derece pozisyonunda gereksiz aşırı yüklenmeleri ve karakteristik çatırtıları önlemek için uç noktaları 10 ° ve 170 ° 'ye ayarlamak daha iyidir. Cihazı çalıştırırken, besleme voltajını izlemek önemlidir. Bu göstergenin güçlü bir şekilde fazla tahmin edilmesiyle dişli mekanizmalarının mekanik elemanları zarar görebilir.
MG995 ve MG996 tower pro Servolar
Servo MG995, çoğunlukla Arduino projelerine bağlı olan en popüler ikinci servo modelidir. Bunlar, SG90'dan çok daha iyi performansa sahip nispeten ucuz servolardır.
Özellikler MG995
MG995'in çıkış mili 120 derece dönüyor (her yönde 60), ancak birçok perakendeci 180 derece teklif veriyor. Cihaz plastik bir kasada yapılmıştır.
- Ağırlık 55 g;
- Tork 8.5 kg x cm;
- Hız 0.2s / 60 derece (4.8V'de);
- Çalışma güç kaynağı 4.8 - 7.2V;
- Çalışma sıcaklıkları - 0C'den -55C'ye.
Tanım MG995
Arduino ile bağlantı da üç kabloyla gerçekleşir. Prensip olarak, hobi projeleri için, MG995'in doğrudan Arduino'ya bağlanmasına izin verilir, ancak motor akımı, kartın girişleri için her zaman tehlikeli bir yük oluşturacaktır, bu nedenle, her iki güç döngüsünün topraklamasını bağlamayı hatırlayarak, servoya ayrı ayrı güç verilmesi önerilir. Hayatı kolaylaştıran bir başka seçenek de, incelemesini ayrı bir makalede hazırlayacağımız hazır servo denetleyicileri ve kalkanları kullanmaktır.
MG996R, özellikleri bakımından MG995'e benzer, sadece metal bir kasada yapılır.
Bir servoyu sürekli dönüşlü bir servoya dönüştürme
Yukarıda açıklandığı gibi, servo, direksiyon açısını ayarlayan değişken genişlikli darbelerle çalıştırılır. Mevcut pozisyon potansiyometreden okunur. Mil ve potansiyometreyi ayırırsanız, servo motor, orta noktada olduğu gibi potansiyometre kaydırıcısının konumunu alacaktır. Tüm bu eylemler geri bildirimlerin kaldırılmasına yol açacaktır. Bu, sinyal kablosu aracılığıyla hızı ve dönüş yönünü kontrol etmenize ve sürekli bir dönüş servosu oluşturmanıza olanak tanır. Sabit bir dönüş servosunun belirli bir açıda dönemeyeceğini ve kesin olarak belirtilen sayıda dönüş yapamayacağını unutmamak önemlidir.
Yukarıdaki işlemleri gerçekleştirmek için, cihazı sökmeniz ve tasarımda değişiklikler yapmanız gerekecektir.
Arduino IDE'de, rocker'ı orta konuma getirecek küçük bir çizim oluşturmanız gerekir.
#Dahil etmek
Bundan sonra cihaz Arduino ya bağlanmalıdır. Bağlandığında servo dönmeye başlayacaktır. Direnci düzenleyerek tamamen durması gerekir. Dönme durduktan sonra, mili bulmanız, esnek elemanı ondan çıkarmanız ve geri takmanız gerekir.
Bu yöntemin birkaç dezavantajı vardır - direncin tam bir duruşa ayarlanması kararsızdır, en ufak bir şok / ısıtma / soğutma ile ayarlanan sıfır noktası kaybolabilir. Bu nedenle, potansiyometreyi bir düzeltici ile değiştirme yöntemini kullanmak daha iyidir. Bunu yapmak için, potansiyometreyi çıkarmanız ve aynı dirence sahip bir düzeltici direnci ile değiştirmeniz gerekir. Sıfır noktası bir kalibrasyon taslağı ile ayarlanmalıdır.
Bir servoyu sürekli dönüşlü bir servoya dönüştürmenin herhangi bir yönteminin dezavantajları vardır. Birincisi, sıfır noktasını ayarlamak zordur, herhangi bir hareket onu düşürebilir. İkinci olarak, kontrol aralığı küçüktür - darbe genişliğindeki küçük bir değişiklikle hız önemli ölçüde değişebilir. Aralığı Arduino'da programlı olarak genişletebilirsiniz.
Sonuç
Servolar, robotikten akıllı ev sistemlerine kadar birçok Arduino projesinde çok önemli bir rol oynamaktadır. Geleneksel olarak hareketle ilgili her şey özel bilgi gerektirir ve eksiksiz, düzgün çalışan bir sürücü oluşturmak kolay bir iş değildir. Ancak servo motorların yardımıyla görev birçok durumda basitleştirilebilir, bu nedenle giriş seviyesi projelerde bile servo sürekli olarak kullanılır.
Bu yazıda, arduino projelerinde servo sürücü kullanmanın farklı yönlerini ortaya çıkarmaya çalıştık: bağlantıdan eskiz yazmaya kadar. En basit servo modelini seçerek (örneğin, sg 90), verilen örnekleri kolayca tekrarlayabilir ve içinde bir şeyin hareket ettiği ve değiştiği ilk projelerinizi oluşturabilirsiniz. Bu makalenin bu konuda size yardımcı olacağını umuyoruz.









Samsung Gear Live akıllı saatin şarj mekanizmasına zarar vermek çok kolaydır Samsung Gear ın akıllı saati nasıl şarj edilir
HTC One Dual Sim akıllı telefon incelemesi: tek değil
Ayarları girmek için bir yönlendiriciye bağlanma
Windows'u HP dizüstü bilgisayarınıza kendiniz nasıl yeniden yükleyeceğinize ilişkin ipuçları