В настоящее время, управление скоростью двигателей переменного тока с помощью преобразователей частоты широко применяется практически во всех отраслях промышленности.
На практике, применяются системы регулирования скорости трехфазных двигателей переменного тока на основе двух разных принципов управления:
2. Векторное управление.
Методы регулирования, используемые в преобразователях частоты для управления двигателями переменного тока
В настоящее время, управление скоростью двигателей переменного тока с помощью преобразователей частоты широко применяется практически во всех отраслях промышленности. Это, прежде всего, связано с большими достижениями в области силовой электроники и микропроцессорной техники, на основе которых были разработаны частотные преобразователи. С другой стороны, унификация производства преобразователей частоты производителями, позволила достаточно сильно повлиять на их стоимость и сделала их окупаемыми в достаточно короткие промежутки времени. Экономия энергоресурсов при применении преобразователей для управления асинхронными двигателями в некоторых случаях может достигать 40% и более.
На практике, применяются системы регулирования скорости трехфазных двигателей переменного тока на основе двух разных принципов управления:
1. U/f- регулирование (вольт-частотное или скалярное управление);
2. Векторное управление.
U/f- регулирование скорости асинхронного электропривода
Скалярное управление или U/f-регулирование асинхронным двигателем - это изменение скорости двигателя путем воздействия на частоту напряжения на статоре при одновременном изменении модуля этого напряжения. При U/f-регулировании частота и напряжение выступают как два управляющих воздействия, которые обычно регулируются совместно. При этом частота принимается за независимое воздействие, а значение напряжения при данной частоте определяется исходя из того, как должен изменяться вид механических характеристик привода при изменении частоты, т.е., из того, как должен меняться в зависимости от частоты критический момент. Для реализации такого закона регулирования необходимо обеспечить постоянство соотношения U/f=const, где U-напряжение на статоре, а f-частота напряжения статора.
При постоянстве перегрузочной способности номинальные коэффициент мощности и к.п.д. двигателя на всем диапазоне регулирования частоты вращения практически не изменяются.
К законам U/f-регулирования можно отнести законы, связывающие величины и частоты питающего двигатель напряжения (U/f=const, U/f2=const и другие). Их достоинством является возможность одновременного управления группой электродвигателей. Скалярное управление используется для большинства практических случаев применения частотного электропривода с диапазоном регулирования частоты вращения двигателя без использования датчика обратной связи до 1:40. Алгоритмы скалярного управления не позволяют реализовать контроль и управление вращающим моментом электродвигателя, а также режим позиционирования. Наиболее эффективная область применения данного способа управления: вентиляторы, насосы, конвейеры и т.д.
Векторное управление
Векторное управление – это метод управления синхронными и асинхронными двигателями, не только формирующий гармонические токи и напряжения фаз (скалярное управление), но и обеспечивающий управление магнитным потоком двигателя. В основе векторного управления лежит представление о напряжениях, токах, потокосцеплениях, как о пространственных векторах.
Основные принципы были разработаны в 70-х годах 20 века. В результате фундаментальных теоретических исследований и успехов в области силовой полупроводниковой электроники и микропроцессорных систем, на сегодняшний день, разработаны электроприводы с векторным управлением, которые серийно выпускаются производителями приводной техники всего мира.
При векторном управлении в асинхронном электроприводе в переходных процессах имеется возможность поддерживать постоянство потокосцепления ротора, в отличие от скалярного регулирования, где потокосцепление ротора в переходных процессах меняется при изменении токов статора и ротора, что приводит к снижению темпа изменения электромагнитного момента. В приводе с векторным управлением, где потокосцепление ротора можно поддерживать постоянным, электромагнитный момент изменяется так быстро, как быстро изменяется составляющая тока статора (аналогия с изменением момента при изменении тока якоря в машине постоянного тока).
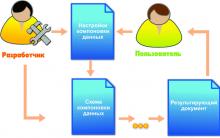
При векторном управлении в звене управления подразумевается наличие математической модели регулируемого электропривода. Режимы векторного управления можно проклассифицировать следующим образом:
1. По точности математической модели электродвигателя, используемой в звене управления:
. Использование математической модели без дополнительных уточняющих измерений устройством управления параметров электродвигателя (используются лишь типовые данные двигателя, введенные пользователем);
Использование математической модели с дополнительными уточняющими измерениями устройством управления параметров электродвигателя, т.е. активных и реактивных сопротивлений статора/ротора, напряжения и тока двигателя.
2. По наличию или отсутствию обратной связи по скорости (датчика скорости) векторное управление можно разделить на:
Управление двигателем без обратной связи по скорости – при этом устройством управления используются данные математической модели двигателя и значения, полученные при измерении тока статора и/или ротора;
Управление двигателем с обратной связью по скорости – при этом устройством используется не только значения, полученные при измерении тока статора и/или ротора электродвигателя (как в предыдущем случае), но и данные о скорости (положении) ротора от датчика, что в некоторых задачах управления позволяет повысить точность отработки электроприводом задания скорости (положения) .
К основным законам векторного управления можно отнести следующие:
а. Закон обеспечивающий постоянство магнитного потокосцепления статора ψ1 (соответствующее постоянству Евнеш /f).
б. Закон, обеспечивающий постоянство магнитного потокосцепления воздушного зазора ψ0 (постоянство Е/f);
в. Закон, обеспечивающий постоянство магнитного потокосцепления ротора ψ2 (постоянство Евнут/f).
Закон поддержания постоянства потокосцепления статора реализуется при поддержании постоянного отношения ЭДС статора к угловой частоте поля. Основной недостаток такого закона – пониженная перегрузочная способность двигателя при работе на высоких частотах. Обусловлено это увеличением индуктивного сопротивления статора и, следовательно, снижением потокосцепления в воздушном зазоре между статором и ротором при увеличении нагрузки.
Поддержание постоянства главного потока повышает перегрузочную способность двигателя, но усложняет аппаратную реализацию системы управления и требует либо изменений конструкции машины, либо наличия специальных датчиков.
При поддержании постоянного потокосцепления ротора, момент двигателя не имеет максимума, однако при увеличении нагрузки увеличивается главный магнитный поток, приводящий к насыщению магнитных цепей и, следовательно, к невозможности поддержания постоянства потокосцепления ротора.
Сравнительная оценка законов регулирования скорости асинхронным электроприводом изменением частоты напряжения на статоре
На рис.1 приведены результаты теоретических исследований энергетических показателей асинхронного двигателя мощностью Рн=18,5 кВт при различных законах частотного управления, которые проводились в работе В.С. Петрушина и к.т.н. А.А. Танькова «Энергетические показатели асинхронного двигателя в частотном электроприводе при различных законах управления». Там же даны результаты эксперимента, проведенного при испытании этого двигателя (закон частотного управления U/f = const). Двигатель работал на нагрузку с постоянным моментом 30,5 Нм в диапазоне скоростей 500 - 2930 об/мин.
Сопоставив полученные зависимости можно сделать вывод, что в зоне небольших скоростей при использовании законов управления второй группы КПД больше на 7-21%, а коэффициент мощности меньше на 3-7%. С увеличением скорости различия снижаются.

Рис.1. Изменение КПД (а) и cosφ (б) в диапазоне регулирования: 1 - экспериментальные зависимости; расчетные зависимости при разных законах управления: 2 - U/f = const, 3 - Евнеш /f = const, 4 - Е/f= const, 5 - Евнут /f= const.
Таким образом, законы векторного управления обеспечивают не только лучшее управление электроприводом в статических и динамических режимах, но и повышение КПД двигателя и, соответственно, всего привода. Однако все законы с поддержанием постоянства потокосцепления имеют свои определенные недостатки.
Общим недостатком законов с поддержанием постоянства потокосцепления являются: низкая надежность, обусловленная наличием датчиков, встраиваемых в двигатель, и потери в стали при работе двигателя с нагрузочным моментом меньше номинального. Эти потери вызваны необходимостью поддержания постоянного номинального потокосцепления в различных режимах работы.
Существенно повысить КПД двигателя можно путем регулирования магнитного потока статора (ротора) в зависимости от величины нагрузочного момента (скольжения). Недостатками такого управления являются низкие динамические характеристики привода, обусловленные большой величиной постоянной времени ротора, из-за чего магнитный поток машины восстанавливается с некоторой задержкой и сложность технической реализации системы управления.
На практике группа законов с постоянством магнитного потока получила распространение для динамичных электроприводов, работающих с постоянным моментом сопротивления на валу и с частыми ударными приложениями нагрузки. В то время как группа законов с регулированием магнитного потока в функции нагрузки на валу применяется для низкодинамичных электроприводов и для приводов с “вентиляторной” нагрузкой.
При проектировании частотного регулирования электропривода возникает необходимость построения адекватных моделей, в полной мере учитывающих специфику протекающих электромеханических процессов в двигателе. Для апробации моделей необходимо сравнение с физически реализуемым процессом на реальном оборудовании, в связи с этим возникает необходимость определения параметров реальных электродвигателей для проверки модели на адекватность. В статье описана математическая модель векторного управления асинхронным электродвигателем. Модель позволяет отслеживать электромеханические процессы в электродвигателе при его работе. Получены графики механических и электрических переходных процессов, характеризующих пуск электродвигателя. Построена механическая характеристика электродвигателя при векторном управлении, наглядно показывающая увеличение нагрузочного диапазона. Произведена оценка адекватности модели. Математические эксперименты и создание модели выполнены в графической среде имитационного моделирования Simulink – приложении к пакету Matlab.
инвертор
математическая модель
механическая характеристика
векторное управление
асинхронный двигатель
1. Виноградов А.Б. Векторное управление электроприводами переменного тока / ГОУ ВПО «Ивановский государственный энергетический университет имени В.И. Ленина». – Иваново, 2008. – 297 с.
2. Лиходедов А.Д. Построение механической характеристики асинхронного двигателя и её апробация // Современные проблемы науки и образования. – 2012. – № 5. – URL: http://www..09.2012).
3. Усольцев А.А. Векторное управление асинхронными двигателями: учебное пособие по дисциплинам электромеханического цикла. – СПб., 2002.
4. Шувалов Г.А. Экономия электроэнергии с помощью частотного преобразователя // Электрооборудование: эксплуатация и ремонт. – 2012. – № 2.
5. Blaschke, F. Das Prinzip der Feldorientierung, die Grundlage für die Transvector-Regelung von Drehfeldmaschinen (in German), Siemens-Zeitschrift 45, Heft 10, 1971.
6. PLC – это просто!! Векторное управление. – URL: http://plc24.ru/vektornoe-upravlenie/ (дата обращения: 12.09.2012).
Развитие асинхронного электропривода с векторным управлением
Принято различать два основных способа управления электроприводами переменного тока, использующими в качестве преобразователей энергии по-лупроводниковые преобразователи частоты: частотное и векторное.
При частотном управлении в ЭП реализуется один из статических за-конов частотного управления (например, , и т.д.). На выходе системы управления формируется задание по частоте и ам-плитуде выходного напряжения ПЧ. Область применения таких систем: асинхронный электропривод, к кото-рому не предъявляется повышенных статических и динамических требований, вентиляторы, насосы и прочие общепромыш-ленные механизмы.
При векторном управлении управление осуществляется по мгновен-ным значениям переменных. В цифровых векторных системах может выпол-няться управление по эквивалентным (усредненным на интервале дискретно-сти управления) переменным .
В 1971 году Блашке предложил принцип построения системы управления асинхронным двигателем , в котором использовалась векторная модель АД с ориентацией системы координат по потокосцеплению ротора. Этот принцип называется также прямым управлением моментом . Векторное управление позволяет существенно увеличить диапазон управления, точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя.
Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При непосредственном управлении моментом необходимо изменять, кроме амплитуды, и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин «векторное управление».
Для управления вектором тока, а, следовательно, положением магнитного потока статора относительно вращающегося ротора требуется знать точное положение ротора в любой момент времени. Задача решается либо с помощью выносного датчика положения ротора, либо определением положения ротора путем вычислений по другим параметрам двигателя. В качестве этих параметров используются токи и напряжения статорных обмоток.
Менее дорогим является частотно регулируемый электропривод с векторным управлением без датчика обратной связи скорости, однако векторное управление при этом требует большого объема и высокой скорости вычислений от преобразователя частоты. Кроме того, для непосредственного управления моментом при малых, близких к нулевым скоростям вращения работа частотно-регулируемого электропривода без обратной связи по скорости невозможна. Векторное управление с датчиком обратной связи по скорости обеспечивает диапазон регулирования до 1:1000 и выше, точность регулирования по скорости - сотые доли процента, точность по моменту - единицы процентов .
Питание АД и СД в режиме векторного управления осуществляется от инвертора, который может обеспечить в любой момент времени требуемые амплитуду и угловое положение вектора напряжения (или тока) статора. Измерение амплитуды и положение вектора потокосцепления ротора производится с помощью наблюдателя (математический аппарат, позволяющий восстанавливать неизмеряемые параметры системы). В зависимости от условий эксплуатации электропривода возможно управление электродвигателем как в режимах с обычной точностью, так и в режимах с повышенной точностью отработки задания на скорость или момент. Так, например, частотный преобразователь обеспечивает точность поддержания скорости вращения ±2-3% в режиме U/f, при векторном управлении без датчика скорости ±0,2%, при полном векторном управлении с датчиком скорости обеспечивается точность ±0,01% .
Общий принцип векторного управления АД
В дальнейшем мы будем использовать следующие индексы систем координат: a-b - неподвижная система координат (), ориентированная по оси фазы a обмотки статора; x-y - система координат, вращающаяся синхронно с ротором () и ориентированная по оси фазы a его обмотки; d-q - система координат, вращающаяся синхронно с потокосцеплением ротора () и ориентированная по его направлению; m-n - произвольно ориентированная система координат, вращающаяся с произвольной скоростью .
Общий принцип моделирования и построения системы управления АД заключается в том, что для этого используется система координат, постоянно ориентированная по направлению какого-либо вектора, определяющего электромагнитный момент. Тогда проекция этого вектора на другую ось координат и соответствующее ей слагаемое в выражении для электромагнитного момента будут равны нулю, и формально оно принимает вид, идентичный выражению для электромагнитного момента двигателя постоянного тока, который пропорционален по величине току якоря и основному магнитному потоку.
В случае ориентации системы координат по потокосцеплению ротора (![]() ) момент можно представить как:
) момент можно представить как:
![]() , (1)
, (1)
где - индуктивность рассеяния цепи ротора, - индуктивность цепи намагничивания, - число пар полюсов, - проекции токов статора на оси системы координат .
По данному выражению можно при условии постоянства потокосцепления ротора управлять электромагнитным моментом, изменяя проекции тока статора на поперечную ось . Выбор уравнения для построения системы управления играет большую роль, т.к. многие величины, в особенности у короткозамкнутых АД, не могут быть измерены. Кроме того, этот выбор существенно влияет на сложность передаточных функций системы, иногда в несколько раз увеличивая порядок уравнений.
Для построения системы векторного управления АД нужно выбрать вектор, относительно которого будет ориентирована система координат, и соответствующее выражение для электромагнитного момента, а затем определить входящие в него величины из уравнений для цепи статора и/или ротора (2) :
![]() , (2, а)
, (2, а)
![]() , (2, б)
, (2, б)
где - напряжение обмоток статора в векторной форме; - активные сопротивления обмоток статора и ротора; составляющие ,связаны с изменением потокосцепления во времени вследствие изменения во времени токов и называются ЭДС трансформации, по аналогии с процессами ее возбуждения в соответствующей электрической машине; составляющие , - связаны с изменением потокосцепления вследствие вращения ротора и называются ЭДС вращения.
Если в качестве опорного вектора выбрать потокосцепление ротора и ориентировать по нему координатную систему так, чтобы ее вещественная ось совпадала с направлением , то угловая частота вращения системы координат будет равна угловой частоте питания статора , т.к. векторы потокосцеплений статора и ротора вращаются с одинаковой частотой. Применение вектора потокосцепления ротора теоретически обеспечивает большую перегрузочную способность АД.
При этом проекции вектора тока статора с учетом того, что , равны:
![]() (3)
(3)
где - электромагнитная постоянная времени ротора.
Выразим потокосцепление и угловую частоту ротора:
![]() (4)
(4)
Таким образом, с помощью проекции тока статора можно управлять потокосцеплением ротора, и передаточная функция этого канала соответствует апериодическому звену с постоянной времени, равной постоянной времени ротора; а с помощью проекции можно независимо и безынерционно управлять частотой ротора .
При этом электромагнитный момент АД можно определить, зная частоту токов ротора при заданном потокосцеплении:
![]() , (5)
, (5)
Выражения - определяют связь между проекциями тока статора на оси координат, потокосцеплением, частотой ротора и электромагнитным моментом АД. Из выражения и уравнения движения следует, что управление моментом может осуществляться безынерционно двумя входными сигналами: потокосцеплением и частотой ротора. Эти сигналы связаны с проекциями вектора тока статора выражениями . Поэтому устройство векторного управления содержит блок развязки координат (РК), осуществляющий преобразования в соответствии с выражениями (3), а также ротатор, вращающий вектор тока статора в направлении, противоположном вращению ротора АД. Входными сигналами для устройства управления будут линейное напряжение сети и частота питающего напряжения, соответствующие потокосцеплению и частоте ротора. Название блока развязки координат происходит от выполняемой им функции формирования сигналов, соответствующих независимым (развязанным, разделённым) проекциям вектора тока статора (рисунок 1).

Рис. 1. Структурная схема блока развязки координат.
Из выражения для электромагнитного момента (5) и общего уравнения движения можно получить передаточную функцию АД по каналу управления частотой ротора:
где - механическая постоянная времени. Эта передаточная функция полностью соответствует двигателю постоянного тока, поэтому построение систем электропривода с векторным управлением АД ничем не отличается от приводов постоянного тока.
Следует отметить, что устройство управления может выполнять свои функции только при условии, что параметры АД, входящие в передаточные функции его звеньев, соответствуют истинным значениям, в противном случае потокосцепление и частота ротора в АД и в устройстве управления будут отличаться друг от друга. Это обстоятельство создает значительные трудности при реализации систем векторного управления на практике, т.к. параметры АД изменяются в процессе работы. В особенности это относится к значениям активных сопротивлений .
Математическое описание координатных преобразований
Если вектор тока представлен в неподвижной системе координат (a, b), то переход к новой системе координат (x,y), развернутой относительно исходной на некоторый угол (рисунок 2а), осуществляется из следующего соотношения аргументов комплексных чисел:
Или ![]() (7)
(7)

Рис. 2. Обобщенный вектор тока в различных системах координат.
Для системы координат, вращающейся с постоянной угловой частотой , угол равен .
Преобразование координат можно записать в развернутом виде следующим образом:
Отсюда можно найти составляющие вектора и в матричной форме:
![]() , (9)
, (9)
где , - мгновенные значения токов соответствующих обмоток.
Необходимым элементом системы векторного управления АД является ротатор, осуществляющий преобразование координат векторов в соответствии с выражением (9) .
Для преобразования переменных из системы координат (d,q) в систему координат (a, b) воспользуемся следующими уравнениями:
где γ - угол полеориентирования. Структурная схема ротатора изображена на рисунке 3.

Рис. 3. Структурная схема ротатора.
Математическая модель АД
Асинхронный двигатель смоделирован в системе координат - α, β. Уравнения, соответствующие этой системе координат, описываются системой уравнений:
 (11)
(11)
где: , , , - составляющие векторов потокосцепления статора и ротора в системах координат ; , - составляющие вектора напряжения статора в системах координат ; - активные сопротивления обмоток статора и ротора; - полные индуктивности обмоток статора и ротора (17),(18);- коэффициенты электромагнитной связи статора и ротора (12),(13); p - число пар полюсов; - механическая скорость ротора; J - момент инерции ротора двигателя; - момент сопротивления на валу двигателя.
Значения полных индуктивностей обмоток и коэффициентов электромагнитной связи статора и ротора вычисляются по формулам:
где:- индуктивности рассеяния; - индуктивность цепи намагничивания,
где: - индуктивное сопротивление рассеяния обмоток статора и ротора; - индуктивное сопротивление цепи намагничивания; f - частота напряжения, подводимого к статору.
При решении системы дифференциальных уравнений в координатах (11) можно получить динамическую механическую характеристику и временные характеристики переменных состояния (например, момента и скорости), которые дают представление о процессах, протекающих в двигателе. Составляющие напряжения, подводимого к статорной обмотке двигателя, вычисляются по формуле:
![]() (19)
(19)
где U - действующее значение напряжения, подводимого к статору.
Решение уравнений сводится к интегрированию левой и правой частей каждого дифференциального уравнения системы:
 (20)
(20)
Токовременные зависимости вычисляются по уравнениям:
 (21)
(21)
Паспортные данные АД ДМТ f 011-6у1 приведены в статье .
На рисунке 4 изображена модель АД, управляемого током статора, в системе координат, ориентированной по потокосцеплению ротора.

Рис. 4. Модель векторного управления АД в среде Simulink:
АД - асинхронный двигатель;
УУ - устройство управления, включающее: РК - блок развязки координат, Р - ротатор;
Н - нагрузка, учитывающая также сопротивление подшипников.
Модель векторного управления АД позволяет отслеживать электромагнитные процессы, происходящие в асинхронном двигателе при его работе.
На следующем графике (рисунок 5) изображена механическая характеристика электродвигателя при векторном управлении, полученная модельным путем, в сравнении с механической характеристикой электродвигателя без регулятора, полученной при натурном эксперименте .

Рис. 5. Сравнение механических характеристик.
Как можно видеть по графику, при векторном управлении механическая характеристика асинхронного двигателя приобретает жёсткость, вследствие чего расширяется перегрузочный диапазон. Значения характеристик в диапазоне от 0 до 153 Н·м расходятся незначительно, погрешность составляет лишь 1,11%, следовательно, полученная математическая модель адекватно отражает работу реального двигателя и её можно использовать для проведения экспериментов в инженерной практике.
Заключение
Применение векторного управления позволяет посредством изменения амплитуды и фазы питающего напряжения напрямую управлять электромагнитным моментом электродвигателя. Для векторного управления асинхронным двигателем следует сначала привести его к упрощенной двухполюсной машине, которая имеет две обмотки на статоре и роторе, в соответствии с этим имеются системы координат, связанные со статором, ротором и полем. Векторное управление подразумевает наличие в звене управления математической модели регулируемого электродвигателя.
Механические характеристики, полученные при работе описанной модели, подтверждают теоретические сведения о векторном управлении. Модель адекватна и может применяться для дальнейших экспериментов.
Рецензенты:
Швецов Владимир Алексеевич, д.т.н., профессор кафедры РЭС КамчатГТУ, г. Петропавловск-Камчатский.
Потапов Вадим Вадимович, д.т.н., профессор филиала ДВФУ, г. Петропавловск-Камчатский.
Библиографическая ссылка
Лиходедов А.Д., Портнягин Н.Н. МОДЕЛИРОВАНИЕ ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ // Современные проблемы науки и образования. – 2013. – № 1.;URL: http://science-education.ru/ru/article/view?id=8213 (дата обращения: 18.03.2019). Предлагаем вашему вниманию журналы, издающиеся в издательстве «Академия Естествознания»
Наиболее известный метод экономии энергии – сокращение частоты вращения электродвигателя переменного тока. Поскольку мощность пропорциональна кубу скорости вращения вала, то небольшое снижение скорости может привести к значительной экономии электричества. Насколько это актуально для производства, понимает каждый. Но как этого достичь? На этот и другие вопросы мы ответим, но прежде, поговорим о видах управления асинхронными двигателями.
Электрический привод переменного тока – это электромеханическая система, которая служит основой большинству технологических процессов. Важная роль в ней принадлежит преобразователю частоты (ПЧ), отвечающему заглавную «игру главной скрипки дуэта»–асинхронного двигателя (АД).
Немного элементарной физики
Со школьной скамьи мы имеем ясное представление о том, что напряжение – это разность потенциалов между двумя точками, а частота – это величина, равная количеству периодов, которые ток успевает пройти буквально за секунду.
В рамках технологического процесса часто приходится изменять рабочие параметры сети. Для этой цели существуют преобразователи частоты: скалярный и векторный. Почему их так называют? Начнём с того, что особенные черты каждого типа становятся понятными из их названия. Вспомним основы элементарной физики и позволим себе называть ПЧ для упрощения короче. «Векторник» имеет определённое направление и подчиняется правилам векторов. «Скалярник» ничего этого не имеет, поэтому алгоритм метода управления им, естественно, очень простой. С названиями, кажется, определились. Теперь о том, как различные физические величины из математических формул связаны между собой.
Помните, что как только скорость уменьшается, вращающий момент увеличивается и наоборот? Значит, чем больше вращение ротора, тем больший поток пойдет через статор, и, следовательно,будет наводиться большее напряжение.
Тоже самое лежит в принципе действия в рассматриваемых нами системах, только в«скалярнике» управляется магнитное поле статора, а в «векторнике»играет роль взаимодействие магнитных полей статора и ротора.В последнем случае технология позволяет улучшать технические параметры работы двигательной установки.
Технические различия преобразователей
Отличий существует много, выделим самые основные, и без научной паутины слов. У скалярного (бездатчикового) частотника зависимость U/F – линейная и диапазон скоростного регулирования довольно небольшой. Кстати сказать, поэтому на низких частотах недостаёт напряжения для поддержания крутящего момента, и приходится порой настраивать вольт-частотную характеристику (ВЧХ) под рабочие условия, то же самое происходит при максимальной частоте выше 50 Гц.
При вращении вала в широком скоростном и низкочастотном диапазоне, а также выполнении требований авторегулирования момента, используют метод векторного управления с обратной связью. В этом проявляется еще одно различие: у «скалярника» обычно такой обратной связи нет.
Какие же выбрать ЧП? В применении того или другого устройства, главным образом, руководствуются сферой использования электрического привода. Однако в особых случаях выбор типа преобразователя частоты становится безвариантным. Во-первых: есть явная, заметная разница в цене (скалярные стоят намного дешевле, нет надобности в дорогостоящих вычислительных ядрах). Поэтому удешевление производства порой перевешивает в принятии решения по выбору. Во-вторых: есть сферы применения, в которых возможно только их использование, к примеру, в конвейерных линиях, где несколько электродвигателей синхронно управляются от одного (ЧРП).
Скалярный метод
Асинхронный электропривод со скалярным управлением скоростью (т. е. по ВЧХ) так и остаётся по сегодняшнее время самым распространенным. В основе метода лежит то, что скорость двигателя является функцией выходной частоты.
Скалярное управление двигателями – оптимальный выбор для случаев, когда нет переменной нагрузки, и в хорошей динамике нет также потребности. Для работы «скалярника» не требуются какие-либо датчики. При использовании рассматриваемого метода, нет необходимости в дорогостоящем цифровом процессоре, как в случае с векторным управлением.
Метод часто применяется для автоуправления , вентиляторными, компрессорными и иными агрегатами.Здесь требуется, чтобы поддерживалась или скорость вращения вала движка с применением датчика, или иной заданный показатель (к примеру, температура жидкости, контролируемая по соответствующему прибору слежения).
При скалярном управлении частотно-амплитудное изменение напряжения питания определяется по формуле U/fn = const. Это позволяет обеспечить постоянный магнитный поток в двигателе. Способ достаточно простой, легко реализуется, но не без некоторых существенных недостатков:
- не представляется возможным одновременное регулирование моментом и скоростью, поэтому выбирается та величина, которая с технологической точки зрения самая значимая;
- узкий диапазон скоростного регулирования и низкий момент на малых скоростях;
- плохая работа с динамически изменяющейся нагрузкой.
А что собой представляет векторный метод?
Векторный метод
Он возник в процессе усовершенствования, и применяется при требовании реализовать максимальное быстродействие, регулирование в широком скоростном диапазоне и управляемость момента на валу.
В новейших моделях электрических приводов в систему управления (СУ) по этому типу внедряется математическая модель двигателя, которая способна рассчитать момент движка и скорость вращения вала. При этом требуется лишь установка датчиков тока фаз статора.
Сегодня обладают достаточным числом достоинств:
- высокая точность;
- без рывков, плавное вращение АД;
- широкий диапазон регулирования;
- быстрое реагирование на изменение нагрузки;
- обеспечение рабочего режима двигателя, при коем уменьшаются потери на нагрев и намагничивание, а это ведёт к заветному увеличению КПД!
Плюсы, безусловно, очевидны, но метод векторного управления не лишён и недостатков, таких, как вычислительная многосложность и потребность в знании технических показателей АД. Помимо этого, наблюдаются большие, чем у «скалярника», амплитуды скоростных колебаний при постоянной нагрузке. Главная задача при изготовлении частотного преобразователя(«векторника») – обеспечение высокого момента при небольшой скорости вращения.
Схема векторного СУ с блоком широтно-импульсной модуляции (АИН ШИМ) выглядит примерно так:
На изображённой схеме контролируемым объектом является асинхронный двигатель, имеющий связь с датчиком (ДС) на валу. Изображённые блоки – это в действительности звенья цепи СУ, реализуемой на контроллере. Блок БЗП задаёт значения переменных. Логические блоки (БРП) и (БВП) регулируют и вычисляют переменные уравнения. Сам контроллер и другая механическая часть системы находится в электрическом шкафу.
Вариант с частотным микроконтроллером
Частотный преобразователь тока/напряжения предназначен для плавного регулирования основных величин, а также других показателей работы оборудования. Он функционирует как «скалярник» и «векторник» одновременно, используя математические модели, запрограммированные во встроенном микроконтроллере. Последний монтируется в специальный щиток и является одним из узлов информационной сети системы автоматизации.
Блочный контроллер/преобразователь частоты последнее слово техники, в схеме с ними используют дросселя и , уменьшающие интенсивность входных помех. Надо отметить, что за рубежом данному вопросу уделяется особое внимание.В отечественной же практике использование ЕМС фильтров пока остаётся слабым звеном, так как даже не существует толковой нормативной базы. Сами фильтры у нас применяются чаще там, где они не нужны, и где они действительно необходимы, про них почему-то забывают.
Заключение
Дело в том, что электродвигателю в обычном режиме работы от сети свойственно иметь стандартные параметры, это не всегда приемлемо. Устраняется сей факт путём ввода различных редукторных механизмов для снижения частоты до необходимой. На сегодня сформировались две СУ: бездатчиковая и датчиковая система с обратной связью. Их основное отличие в точности контроля. Наиболее точная, конечно, вторая.
Существующие рамки расширяются с помощью использования разных современных СУ АД, обеспечивающих повышенное качество регулирования, высокую перегрузочную способность. Для рентабельного производства, продолжительности срока службы оборудования и экономичного расхода энергии эти факторы имеют большое значение.
Всякое изменение или поддержание постоянной скорости электропривода обеспечивает целенаправленное регулирование момента, развиваемого двигателем. Момент формируется в результате взаимодействия потока (потокосцепления), создаваемого одной частью двигателя с током в другой части и определяется векторным произведением этих двух пространственных моментообразующих векторов. Поэтому величину развиваемого двигателем момента определяют модули каждого вектора и пространственный угол между ними.
При построении систем скалярного управления контролировались и регулировались только численные значения (модули) моментообразующих векторов, но не контролировалось их пространственное положение. Принцип векторного управления заключается в том, что система управления контролирует численное значение и положение в пространстве друг относительно друга моментообразующих векторов. Отсюда задача векторного управления состоит в определении и принудительном установлении мгновенных значений токов в обмотках двигателя таким образом, чтобы обобщенные векторы токов и потокосцеплений занимали в пространстве положение, обеспечивающее создание требуемого электромагнитного момента .
Электромагнитный момент, создаваемый двигателем:
где м - конструктивный коэффициент; , 2 - пространственные
векторы токов или потокосцеплений, образующие момент; X - пространственный угол между моментообразующими векторами.
Как следует из (6.53), минимальные значения токов (потокосцеплений), образующих момент, будут для требуемого значения момента, если векторы х и 2 перпендикулярны друг другу, т.е. Х = °.
В системах векторного управления нет необходимости определять абсолютное пространственное положение векторов, и 2 по отношению к осям статора или ротора. Нужно определить положение одного вектора относительно другого. Поэтому один из векторов принимают за базовый, а положение другого контролирует угол X.
Исходя из этого, при построении систем векторного управления целесообразно исходить из математического описания электромагнитных и электромеханических процессов, выраженных в координатах, привязанных к базовому вектору (координаты и- v). Такое математическое описание приведено в § 1.6.
Если принять за базовый вектор и направить ось координат и по этому вектору, то, исходя из (1.46), получим следующую систему уравнений:

В этих уравнениях? v = , так как вектор совпадает с осью координат и.
На рис. 6.31 представлена векторная диаграмма токов и потоко- сцеплений в осях и - v ^ориентацией координаты и по вектору по- токсцепления ротора. Из векторной диаграммы следует, что

Рис. Б.31. Векторная диаграмма потокосцеплений и токов в осях u-v при М
При постоянстве (или медленном изменении) потокосцепления ротора d"V u /dt= в результате чего i и = и Г = yji u +i v = i v
При этом вектор тока ротора Г перпендикулярен потокосцеп- лению ротора. Поскольку поток рассеяния ротора 0 существенно меньше потока в зазоре машины Ч, т то при постоянстве потокосцепления ротора можно считать, что проекция вектора тока статора на ось координат v i v равна |/"| или /
Достоинством принятой системы координат u-v для построения системы векторного регулирования момента и скорости асинхронного двигателя является то, что момент двигателя (6.54) определяется как скалярное произведение двух взаимоперпендикуляр- ных векторов: потокосцепления ротора *Р и активной составляющей тока статора Такое определение момента, характерное, например, для двигателей постоянного тока независимого возбуждения, наиболее удобно для построения системы автоматического регулирования.
Система векторного управления. Структурная схема такого управления строится, исходя из следующих принципов:
- ? двухканальная система регулирования состоит из канала стабилизации потокосцепления ротора и канала регулирования скорости (момента);
- ? оба канала должны быть независимы, т.е. изменение регулируемых величин одного канала не должно влиять на другой;
- ? канал регулирования скорости (момента) управляет составляющей тока статора / v . Алгоритм работы контура регулирования момента как и в системах подчиненного регулирования скорости двигателей постоянного тока (см. § 5.6) - выходной сигнал регулятора скорости является заданием на момент двигателя. Разделив значение этого задания на модуль потокосцепления ротора и получим задание на составляющую тока статора i v (рис. 6.32);
- ? каждый канал содержит внутренний контур токов / v и i и с регуляторами токов, обеспечивающими необходимое качество регулирования;
- ? полученные значения токов i v и i и посредством координатных преобразований переводятся в значения i а и / р двухфазной неподвижной системы координат а - (3 и затем в задание реальных токов в обмотках статора в системе трехфазных координат а-Ь-с;
- ? необходимые для вычислений и формирования обратных связей сигналы скорости, угла поворота ротора, токов в обмотках статора измеряются соответствующими датчиками и затем с помощью обратных координатных преобразований переводятся в значения этих величин, соответствующих координатным осям u-v.

Рис.
Такая система регулирования обеспечивает быстродействующее регулирование момента, а, следовательно, и скорости в максимально широком диапазоне (свыше 10 000:1). При этом мгновенные значения момента асинхронного двигателя могут значительно превосходить паспортное значение критического момента.
Для того, чтобы сделать каналы регулирования независимыми друг от друга нужно ввести на вход каждого канала перекрестные компенсирующие сигналы е К0МПУ и е компм (см. рис. 6.32). Значение этих сигналов найдем из уравнений цепи статора (6.54). Выразив и ЧК 1у через соответствующие токи и индуктивности (1.4) и учитывая, что при ориентации оси и вдоль вектора потокосцепления ротора Ч / |у =0 получим:
Откуда находим

где коэффициент рассеяния.
Подставив (6.55) в (6.54) и учитывая, что в рассматриваемой системе регулирования d x V 2u /dt = 0, получим

или

ные постоянные времени; е и и e v - ЭДС вращения по осям u - v
Для задания независимых величин i и и / v необходимо компенсировать е и и e v введением компенсирующих напряжений:

Для реализации принципов векторного управления необходимо прямое измерение или расчет по математической модели (оценки) модуля и углового положения вектора потокосцепления ротора. Функциональная схема векторного управления асинхронным двигателем с непосредственным измерением потока в воздушном зазоре машины с помощью датчиков Холла представлена на рис. 6.33 .

Рис. Б.ЗЗ. Функциональная схема прямого векторного управления асинхронным двигателем
Схема содержит два канала регулирования: канал регулирования (стабилизации) потокосцепления ротора *Р 2 и канал регулирования скорости. Первый канал содержит внешний контур потокосцепления ротора, содержащий ПИ-регулятор потокосцепления РП и обратную связь по потокосцеплению, сигнал которой формируется с помощью датчиков Холла, измеряющих поток в зазоре машины х? т по осям аи(3. Реальные значения потока затем пересчитываются в блоке ПП в значения потокосцепления ротора по осям а и р и с помощью вектор-фильтра ВФ находят модуль вектора потокосцепления ротора, который подается как сигнал отрицательной обратной связи на регулятор потокосцепления РП и используется в качестве делителя в канале регулирования скорости.
В первом канале контуру потокосцепления подчинен внутренний контур тока i и, содержащий ПИ-регулятор тока РТ1 и обратную связь по действительному значению тока / 1и, вычисляемому по реальным значениям токов фаз статора с помощью преобразователя фаз ПФ2 и координатного преобразователя КП1. Выходом регулятора тока РТ1 является задание напряжения U lu , к которому прибавляется сигнал компенсации второго канала е кшпи (6.57). Полученный сигнал задания напряжения преобразуют посредством координатного КП2 и фазного ПФ2 преобразователей в заданные значения и фазы напряжений на выходе преобразователя частоты.
Канал регулирования потокосцепления ротора обеспечивает поддержание постоянства потокосцепления Ч* 2 во всех режимах работы привода на уровне заданного значения х Р 2зад. При необходимости ослабления поля Ч*^ может изменяться в некоторых пределах с небольшим темпом изменения.
Второй канал предназначен для регулирования скорости (момента) двигателя. Он содержит внешний контур скорости и подчиненный ему внутренний контур тока / 1у. Задание на скорость поступает от задатчика интенсивности ЗИ, определяющего ускорение и требуемое значение скорости. Обратная связь по скорости реализуется посредством датчика скорости ДС или датчика углового положения ротора.
Регулятор скорости PC принимается пропорциональным или пропорционально-интегральным в зависимости от требований к электроприводу. Выходом регулятора скорости является задание на момент, развиваемый двигателем Л/ зад. Поскольку момент равен произведению тока, на потокосцепление ротора Ч / 2 , то, разделив в блоке деления БД значение задания момента М зад на Ч / 2 , получим значение задания тока, которая подается на вход регулятора тока РТ2. Дальнейшая обработка сигналов аналогична первому каналу. В результате получаем задание на напряжение питания двигателя по фазам, определяющее значение и пространственное положение в каждый момент времени обобщенного вектора напряжения статора!? Отметим, что сигналы, относящиеся к переменным в координатах - , являются сигналами постоянного тока, а сигналы, отражающие токи и напряжения в координатах аир, являются сигналами переменного тока, определяющими не только модуль, но частоту и фазу соответствующего напряжения и тока.
Рассмотренная система векторного управления реализуется в настоящее время в цифровом виде на базе микропроцессоров. Разработаны и широко используются различные структурные схемы векторного управления, отличные в деталях от рассматриваемой. Так, в настоящее время действительные значения потокосцеплений не измеряют датчиками магнитного потока, а рассчитывают по математической модели двигателя, исходя из замеренных фазных токов и напряжений.
В целом векторное управление можно оценить как наиболее эффективный способ управления двигателями переменного тока, обеспечивающий высокую точность и быстродействие управления.
Использование частотного преобразователя направлено на решение важных задач. Они заключаются в осуществлении управления моментом и скоростью электродвигателя. Данные требования указывают на необходимость ограничивать ток двигателя, а также момент значениями, которые являются допустимыми. Это выполняется в процессах пуска, торможения, а также при изменениях нагрузки.
Делать это требуется для того, чтобы ограничивать динамические ударные нагрузки в механизме преобразователя частоты . При этом отмечаются перегрузки при работе и потребность в регулировке момента двигателя, которая выполняется непрерывно. Также выполнение таких действий требуется, когда необходимо точно поддержать усилия на мехнизме, который является рабочим. Примером в данном случае становятся приводы, используемые в станках для обработки металла.
Сущестуют различные методы частотного управления, которые позволяют решить различные задачи при регулировке скорости и измененения момента, среди которых- два основных метода - векторный и скалярный . Каждый из них имеет свои характерные особенности, на которых следует остановиться более подробно.
Первый метод управления - скалярный
. Особенность скалярного управления заключается в его распространенности, а область применения связана с приводами насосов и вентиляторов. Кроме этого, частотные преобразователи со скалярным методом управления используют там, где важно поддерживать определенный технологический параметр. Им может быть, например, давление в трубопроводе. Изменение амплитуды, а также частоты питающего напряжения выступает в качестве основного принципа, на котором основывается данный метод. При этом используется закон U/f. Наибольший диапазон для регулирования скорости составляет 1:10.
Дополнительные особенности скалярного метода заключаются в свойственной ему легкости при реализации. Существует также и недостаток, который заключается в том, что нет возможности точно регулировать скорость вращения вала. Еще одна особенность - на валу двигателя частотный преобразователь со скалярным управлением не дает возможности контролировать момент.
Второй метод, используемый в частотных преобразователях - векторный . Это такой метод управления синхронными и асинхронными двигателями, при котором формируются не только гармонические токи (напряжения) фаз, но и обеспечивается управление магнитным потоком ротора,а именно, моментом на валу электродвигателя. Векторное управление применяется в случае, когда в процессе эксплуатации нагрузка может меняться на одной и той же частоте, т.е. нет четкой зависимости между моментом нагрузки и скоростью вращения, а также в случаях, когда необходимо получить расширенный диапазон регулирования частоты при номинальных моментах.
Системы векторного управления разделяются на два класса - это бездатчиковые и с обратной связью. Область применения позволяет определить применение определенного метода. Применение бездатчиковых систем возможно, когда скорость изменяется не больше чем 1:100, а точность поддержания составляет не больше чем ±0,5 %. При аналогичных показателях, составляющих 1:1000 и ±0,01 % соответственно принято использовать системы с обратной связью.
Преимуществами векторного метода управления является быстрота реакции относительно изменения нагрузки, а в области малых частот вращение двигателя характеризуется плавностью, отсутствием рывков. Внимание привлекает обеспечение на валу при условии нулевой скорости номинального момента, если имеется датчик скорости. Регулировка скорости выполняется при достижении высокой точности. Все эти преимущества становятся важными на практике.
ВЫВОДЫ:
1. Если в скалярных преобразователях частоты объектом контроля и управления является только магнитное поле статора, то в векторных моделях объектом контроля и управления является и магнитное поле статора, и ротора, а точнее - их взаимодействие с целью оптимизации момента вращения на различных скоростях. Что касается методов контроля и управления, то когда применяется скалярный метод управления- используется выходная частота и ток частотного преобразователя, а в случае с векторным управлением - выходная частота, ток и его фаза.








Значение слова неудачный
Обзор Samsung Galaxy A7 (2017): не боится воды и экономии Стоит ли покупать samsung a7
Делаем бэкап прошивки на андроиде
Как настроить файл подкачки?
Установка режима совместимости в Windows