пропорционального изменения размера, выберите одну из угловых опорных точек и удерживайте клавишу Shift нажатой, когда перетаскиваете опорную точку в новое положение.
Для более сложного управления размером объекта, выберите из меню Формат > Объект > Положение и размер . Используйте диалоговое окно Положение и размер для установки ширины и высоты независимо. Если флажокПропорционально установлен, то эти два размера изменяются таким образом, чтобы сохранялась пропорция, что позволяет выполнять пропорциональное изменение размера.
Группировка нарисованных объектов
Чтобы сгруппировать нарисованные объекты:
1) Выделите один объект, затем, удерживая нажатой клавишу Shift , выделите другие объекты, которые вы хотите включить в группу. Вокруг выделенных объектов появится ограничивающий прямоугольник.
2) Когда все объекты выделены, выберите Формат> Сгруппировать > Сгруппировать из меню или наведите курсор мыши на один из объектов, щелкните правой кнопкой мыши и выберитеГруппировка > Сгруппировать из выпадающего контекстного меню.
Размещение изображения в тексте
Когда вы добавляете изображение в текстовый документ, Вы должны выбрать как разместить изображение относительно текста и других изображений. Размещение изображения зачастую отнимает довольно много времени, и может очень разочаровать неопытных и опытных пользователей. Поскольку Writer - текстовый процессор, а не настольная издательская программа, есть некоторые ограничения в гибкости размещения изображений и требуется много времени, чтобы получить в точности то, что требуется. Начиная с OpenOffice.org 3.0 эта задача значительно улучшена за счет включения нового параметра, который допускает “свободную привязку”.
Размещение изображений управляется воздействием на четыре области:
Расположение относится к размещению изображения на воображаемой вертикальной оси. Расположение управляет тем, как изображение располагается друг относительно друга или относительно текста.
Выравнивание означает вертикальное или горизонтальное размещение изображения по отношению к выбранной точке привязки.
Привязка относится к контрольной точке для изображения. Этой точкой может быть страница или врезка, в которой располагается объект, абзац или даже символ.
Обтекание текста определяет как располагается по отношению к изображению окружающий текст, который может охватывать изображение с одной или обеих сторон, располагаться над или под изображением, или изображение может вести себя как отдельный абзац или символ.
К параметрам для каждой из четырех областей управления, описанных выше, можно получить доступ множеством различных способов в зависимости от характера изображения:
1) Из меню Формат , в котором вы можете найти пункты
Выравнивание, Расположение, Обтеканиеи Привязка
(для изображений и нарисованных объектов).
2) В выпадающем контекстном меню, которое отображается при щелчке правой кнопки мыши по изображению.
3) Из панели инструментов Врезка, показанной на Рис. 262, для изображений с примененным стилем врезкиИзображения .
4) На страницах Тип иОбтекание диалогового окна Изображение для картинок. Заметим, что вы не можете управлять расположением, используя диалоговое окно. Чтобы открыть диалоговое окно Изображение, щелкните по изображению для его выделения и затем выберитеФормат > Изображение или щелкните правой кнопкой мыши на изображении и выберитеИзображение из выпадающего контекстного меню.
5) На страницы Положение и размер диалогового окна Положение и размер для нарисованных объектов. Чтобы открыть диалоговое окно Положение и размер, щелкните по нарисованному объекту для его выделения, а затем выберите
Формат > Объект > Положение и размер или щелкните правой кнопкой мыши по нарисованному объекту и выберите

Положение и размер из выпадающего контекстного меню. Заметим, что вы можете управлять только выравниванием и привязкой.
По центру | Обрамление | На передний план |
|||||||||||||||||||||||||||||||||||
Без обтекания | По правому краю | Стиль линии | На задний план |
||||||||||||||||||||||||||||||||||
Обтекание | По верхнему краю | Цвет линий рамки | Изменить | ||||||||||||||||||||||||||||||||||
страницы | привязку | ||||||||||||||||||||||||||||||||||||
Сквозное | По центру | Цвет фона | Связать фреймы |
||||||||||||||||||||||||||||||||||
обтекание | |||||||||||||||||||||||||||||||||||||
По левому краю | По нижнему краю | Свойства фрейма | Разорвать связь |
||||||||||||||||||||||||||||||||||
Рис. 262. Панель инструментов Врезка (графическое управление положением для изображений)
Расположение изображений
Расположение графических объектов означает определение его вертикального положения относительно других графических объектов или текста. Расположение уместно только когда объекты перекрываются. Вы можете выбрать один из четырех параметров, а также специальные настройки для нарисованных объектов:
Рис. 263: Меню Расположить
На передний план : располагает изображение поверх любого другого изображения или текста.
Переместить вперед : поднимает объект на один уровень вверх в стеке (ось Z). В зависимости от количества перекрывающихся объектов, вам может понадобиться применить эту команду несколько раз, чтобы получить желаемый результат.
Переместить назад : противоположно Переместить вперед; отодвигает выбранный объект на один уровень вниз в стеке объектов.

На задний план : перемещает выбранное изображение на дно стека, так что другие изображения и текст перекрывают его.
На заднем плане / На переднем плане : доступно только для нарисованных объектов; помещает нарисованный объект позади или впереди текста, соответственно.
Привязка изображения
Вы можете привязать изображение как символ или к странице, абзацу или символу. Вы можете также поместить изображение во врезку и привязать врезку к странице, абзацу или символу. Какой метод выбрать, зависит от того, чего вы пытаетесь достичь.
Здесь перечислены методы, которыми Вы можете привязать изображение или нарисованный объекты:
К странице
Изображение сохраняет одно и то же положение по отношению к полям страницы. Оно не перемещается, когда Вы добавляете или удаляете текст или другие изображения. Этот метод полезен, когда изображение не должно быть визуально связано с определенной частью текста. Он часто используется при изготовлении бюллетеней и других документов, которые отличаются очень насыщенным расположением, или для размещения логотипов на фирменных бланках.
Если вы планируете использовать документ в составном Внимание документе, не привязывайте изображениеК странице ,
потому что изображение будет исчезать из составного документа. См. Главу 13 (Работа с составными документами) для получения более подробной информации.
Изображение связано с абзацем и перемещается с абзацем. Оно может быть помещено на поля страницы или в другом месте. Этот метод полезен в качестве альтернативы таблицы для размещения значка рядом с абзацем.
К символу
Изображение связано с символом, но располагается не в тексте. Оно перемещается вместе с абзацем, но может быть помещено на поля страницы или в другом месте. Этот метод похож на привязку к абзацу, но не может быть использован с нарисованными объектами.
OpenOffice.org 3 Руководство по Writer |
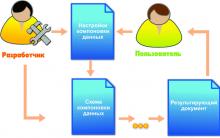
Растровые данные обычно получаются путем сканирования бумажных карт или обработки аэрофотоснимков или спутниковых снимков. Наборы данных, полученные путем сканирования карт, обычно не имеют пространственной привязки (ни внутри набора, ни в виде отдельного файла). Иногда информация о местоположении, поставляемая в наборах данных аэрофотоснимков или космических снимков, является неточной, и такие данные не удается корректно совместить с другими имеющимися пространственными данными. Поэтому, для использования некоторых наборов растровых данных совместно с другими вашими пространственными данными, необходимо осуществить пространственную привязку этих наборов растровых данных в системе координат карты. Система координат карты задается с помощью проекции карты (способ проецирования искривленной поверхности Земли на плоскость).
Пространственная привязка растровых данных выполняется указанием местоположения, с использованием координат карты, и присвоением системы координат фрейму данных. Пространственно привязанные растровые данные позволяют просматривать данные, выполнять к ним запросы и анализировать их вместе с другими географическими данными. Панель инструментов Пространственная привязка позволяет выполнять пространственная привязку наборов растровых данных и слоев наборов растровых данных (которые могут иметь растровые функции), сервисов изображений и растровых продуктов.
В основном, для задания пространственной привязки набора растровых данных используются следующие шаги:
Для просмотра демонстрации пространственной привязки набора растровых данных см. Видео о пространственной привязке .
Привязка растра по опорным точкам
В основном, пространственная привязка растровых данных происходит с использованием имеющихся пространственных данных (целевых данных), таких как растры с пространственной привязкой или класс векторный объектов, которые имеют нужную систему координат карты. Этот процесс включает определение серии опорных точек – известных координат x,y – которые связывают известные местоположения в наборе растровых данных с соответствующими местами в данных, имеющих пространственную привязку (целевые данные). Контрольными точками являются такие местоположения, которые можно легко определить в наборах растровых данных и которые имеют точные координаты. В качестве идентификаторов местоположений могут использоваться, например, пересечения дорог или водных потоков, устья рек, обнажения горных пород, углы улиц или площадей, пересечения лесозащитных полос.
Опорные точки используются для построения полиномиальной трансформации, с помощью которой набор растровых данных будет сдвинут в географически верное местоположение. Соединение между опорной точкой набора растровых данных (точка от) и соответствующей точкой уже выровненных данных (точка к) называется связью.
На примере ниже показана опорная «точка к» (желтый крест), расположенная на слое векторных данных в месте пересечения улиц, и ассоциированная с ней опорная «точка от» (зеленый крест), расположенная на растре. Связь показана голубой линией, соединяющей обе точки.

Необходимое количество связей зависит от сложности преобразования, которое вы планируете использовать для привязки набора растровых данных к карте. Добавление дополнительных связей не обязательно повышает точность преобразования. Если возможно, то лучше равномерно распределить связи по всему набору растровых данных, а не концентрировать их в одном месте. Обычно, наличие одной связи в каждом углу растра и нескольких посередине обеспечивает наилучший результат.
В основном, чем больше область перекрытия между набором растровых данных и целевыми данными, тем лучше результат привязки, поскольку опорные точки, по которым она строится, можно распределить наиболее равномерно. Например, если ваши целевые данные занимают четверть области набора растровых данных, опорные точки будут сконцентрированы только в этом районе. Таким образом, все, что не попадает в область перекрытия, скорее всего, будет привязано некорректно.
Имейте в виду, что точность данных, для которых вы выполняете пространственную привязку, не будет выше точности тех данных, по которым вы это делаете. Чтобы уменьшить количество ошибок, осуществлять пространственную привязку следует по данным самого высокого разрешения и самого крупного масштаба.
Преобразование растра
После того, как вы создали достаточное количество связей, вы можете привязать – или трансформировать – набор растровых данных, чтобы он соответствовал координатам целевых данных. Чтобы добиться максимального совпадения координат для каждой ячейки, вы можете использовать трансформацию методом полиномов, сплайн, методом подгонки или подобия.
Полиномиальная трансформация использует построение полинома на основе опорных точек и алгоритм подбора методом наименьших квадратов (LSF). Этот способ оптимизирован для соблюдения общей точности, но не гарантирует локальной точности. Полиномиальная трансформация использует две формулы: одна для вычисления координат x по входным координатам (x,y) местоположения, а вторая – для вычисления координат y. Задача метода наименьших квадратов – рассчитать общую формулу, которая применима ко всем точкам, обычно за счет небольшого смещения позиций опорных точек. Количество некоррелированных опорных точек, требующееся для этого метода, составляет 1 для нулевого порядка, 3 для первого порядка, 6 – для второго и 10 – для третьего порядка. Полиномы низших порядков имеют тенденцию к ошибке случайного типа, тогда как полиномы высших порядков – к ошибке экстраполяции.
Полиномиальная трансформация первого порядка обычно используется для пространственной привязки изображения. Ниже приведено уравнение для трансформации набора растровых данных, с использованием аффинного (первого порядка) полиномиального преобразования. Шесть параметров определяют трансформацию строк и столбцов растра в координаты карты.

Полином нулевого порядка будет использован для смещения ваших данных. Это часто используется в ситуации, когда ваши данные уже имеют пространственную привязку, но небольшой сдвиг лучше выровняет ваши данные. Для выполнения смещения ваших данных полиномом нулевого порядка необходима только одна ссылка. Рекомендуется сделать несколько связей, затем выбрать ту, которая выглядит наиболее точной.
Используйте трансформацию первого порядка (аффинную) для сдвига, изменения масштаба или поворота набора растровых данных. Это обычно позволяет сохранить прямые линии исходного растра в трансформированном наборе растровых данных. Таким образом, квадраты и прямоугольники набора растровых данных обычно деформируются в параллелограммы, одновременно со случайным изменением масштаба и угловой ориентации.
Всего с тремя связями, математическое выражение, используемое в трансформации первого порядка, может точно привязать каждую точку растра к целевым данным. Использование более трех связей вносит искажения, или невязку, которые распределяются по всем связям. Однако, следует задавать более трех связей, поскольку, если одна из них окажется позиционно неверной, это окажет гораздо большее влияние на процесс преобразования. Следовательно, несмотря на увеличение математической ошибки трансформации при увеличении числа связей, общая точность трансформации также будет увеличиваться.
Чем выше порядок трансформации, тем более сложные искажения могут быть скорректированы. Однако, трансформация выше третьего порядка используется очень редко. Трансформации высокого порядка требуют большее количество связей и, следовательно, больше времени на обработку. Как правило, если набор растровых данных необходимо растянуть, повернуть или изменить его размер, следует использовать трансформацию первого порядка. Для более сложного преобразования применяются трансформации второго или третьего порядка.

Трансформация методом сплайна – это истинный метод резинового листа, оптимизированный для обеспечения локальной, но не глобальной точности привязки. Она основана на сплайн-функции – кусочном полиноме, который обеспечивает гладкие непрерывные переходы между соседними полиномами. Она обеспечивает точное совмещение исходной и конечной опорных точек, но точность совпадения удаленных пикселов не гарантируется. Эта трансформация удобна, если правильное размещение опорных точек имеет первостепенное значение. Добавление дополнительных опорных точек может увеличить общую точность сплайн трансформации. Для нее требуется как минимум 10 опорных точек.
Трансформация методом подгонки подходит для соблюдения как общей точности (метод наименьших квадратов, LSF), так и для локальной. Она построена на алгоритме, который оптимизирует методы интерполяции полиномиальной трансформации и нерегулярной триангуляционной сети (TIN). Полиномиальная трансформация выполняется с помощью двух наборов опорных точек, которые располагают их максимально точно с учетом техники интерполяции TIN. Для подгонки границ необходимо как минимум три опорных точки.
Проективное преобразование может сохранить линии так, что они останутся прямыми. При этом параллельные линии могут оказаться непараллельными. Проективное преобразование особенно полезно для скошенных изображений, сканированных карт и спутниковых снимков Landsat или Digital Globe. Для выполнения проективного преобразования необходимо как минимум четыре связи. При наличии четырех связей ошибка RMS будет равняться нулю. При наличии большего количества связей ошибка RMS будет чуть выше нуля.
Преобразование подобия является трансформацией первого порядка, при которой делаются попытки сохранить форму исходного растра. Среднеквадратичная ошибка имеет тенденцию к возрастанию, по сравнению с другими полиномными трансформациями, поскольку сохранение формы является более приоритетным, чем точная подгонка.
Интерпретация среднеквадратической ошибки
Когда общая формула выведена и применена к опорным точкам, производится измерение ошибки – невязки. Эта ошибка является разницей между реальным и вычисленным положением «точки к». Общая ошибка вычисляется из квадратного корня (RMS) суммы ошибок всех связей. Это значение описывает степень согласования трансформации между всеми опорными точками (связями). Если ошибка слишком велика, для ее уменьшения можно удалить или добавить опорные точки.
Хотя ошибка RMS является хорошей оценкой точности трансформации, не следует путать маленькую величину ошибки RMS с точностью привязки. Например, результат преобразования может иметь значительные неточности из-за неверного выбора опорных точек. Чем больше правильных опорных точек вы используете, тем более точным будет результат конвертации исходных данных. Обычно, трансформация методом подгонки границ и сплайн трансформация дают ошибку RMS около нуля или ноль; однако, это не означает, что изображение точно привязано в пространстве.
Прямое смещение показывает ошибку в тех же единицах измерения, что и установлены пространственной привязкой фрейма данных. Обратные смещения отображают ошибку в пикселах. Прямое и обратное смещение – это мера точности, которая отображается в пикселях. Значения смещений, близкие к нулю, рассматриваются как более точные.
Пересчет набора растровых данных
Когда вы трансформируете, проецируете или пересчитываете набор растровых данных, конвертируете его из одной проекции в другую или изменяете размер ячейки, вы выполняете геометрическое преобразование. Геометрическое преобразование – процесс изменения геометрии набора растровых данных из одного координатного пространства в другое. К геометрическим преобразованиям относятся «резиновый лист» (обычно используется в пространственной привязке), проекция (используется информация о проекции для трансформации данных в другую проекцию), сдвиг (одинаковое смещение всех координат), вращение (вращение всех координат на одинаковый угол) и изменение размера ячейки набора растровых данных.
После выполнения геометрического преобразования, центры ячеек исходного растра редко совпадают с центрами ячеек итогового; однако, значения должны быть привязаны к центрам.
Вам может показаться, что каждая ячейка набора растровых данных трансформируется в новое местоположение карты, но, на самом деле этот процесс происходит не так. Во время выполнения пространственной привязки, с использованием координат карты вычисляется матрица пустых ячеек. Каждой пустой ячейке затем присваивается значение, основанное на результате пересчета.
Три наиболее часто использующиеся метода пересчета это: ближайшая окрестность, билинейная интерполяция и кубическая свертка. Все эти методы присваивают значение каждой пустой ячейке по результатам обработки ячеек набора растровых данных, не имеющего пространственную привязку.
Вычисление ближайшей окрестности является наиболее быстрым методом пересчета и хорошо подходит для обработки категорийных или тематических данных, поскольку при этом не изменяются значения входных ячеек. После того, как положение центров ячеек выходных данных сопоставлено с центрами ячеек входного растра, метод ближайшей окрестности определяет положение центра ближайшей ячейки входного растра и присваивает это значение ячейке выходного растра.
При использовании метода ближайшей окрестности, значения ячеек входного растра не изменяются. Значение 2 во входном растре всегда останется значением 2 в выходном; оно не будет изменено на 2,2 или 3. Поскольку выходные значения остаются неизменными, метод Ближайшего соседства следует использовать с номинальными или ординальными данными, где каждое значение представляет класс, функциональную единицу или классификацию – это могут быть категорийные данные, такие как типы почвы, лесов или землепользования.
Билинейная интерполяция использует значения четырех ближайших центров входных ячеек для вычисления одного значения в выходном растре. Значение выходной ячейки является средневзвешенным значением этих четырех входных ячеек, уточненным согласно их удаленности от центра соответствующей ячейки входного растра. По сравнению с методом ближайшей окрестности, этот метод пересчета позволяет получить более гладкое изображение.
Т.к. значения выходных ячеек вычисляются в зависимости от их относительного положения и значений входных ячеек, билинейная интерполяция подходит для данных, в которых положение относительно известной точки или явления определяет значение ячейки – т.е. для непрерывных поверхностей. Высоты, уклоны, интенсивность шума аэропорта или степень солености грунтовых вод вокруг устья реки представляют собой явления, которые отображаются с помощью непрерывных поверхностей и лучше всего пересчитываются с помощью метода билинейной интерполяции.
Кубическая свертка похожа на билинейную интерполяцию, отличие состоит в том, что средневзвешенное значение вычисляется по значениям в центрах 16 ближайших ячеек. Кубическая свертка позволяет получить более резкое изображение, чем билинейная интерполяция, т.к. большее количество ячеек участвует в процессе вычисления выходного значения. Поэтому этот метод пересчета часто используется для обработки изображений, таких как спутниковые и аэрофотоснимки.
Билинейная интерполяция и кубическая свертка не должны использоваться с категорийными данными, поскольку в выходных данных категории сохранены не будут. Однако, все три метода могут использоваться с непрерывными данными, при этом ближайшая окрестность вызывает появление больших пикселов, билинейная интерполяция дает более гладкую поверхность, а кубическая свертка позволяет получить самое четкое изображение. Приступая к работе над большим проектом пересчета, рекомендуется создать прототип и опробовать несколько методов пересчета, чтобы определить метод, наиболее подходящий к вашим данным.
Необходимо ли трансформировать растр?
Вы можете сохранить преобразование набора растровых данных после выполнения пространственной привязки, используя команду Трансформировать на панели инструментов Пространственная привязка , или с помощью инструмента Трансформировать . Кроме того, вы можете сохранить информацию о преобразовании в дополнительном файле, используя команду на панели инструментов Пространственная привязка .
Трансформация позволяют создавать новый набор растровых данных, имеющий пространственную привязку к координатам карты. Вы можете сохранить его в формате BIL, BIP, BMP, BSQ, DAT, GIF, GRID, IMG, JPEG, JPEG 2000, PNG или TIFF. ArcGIS не требует обязательного преобразования набора растровых данных для отображения его вместе с другими пространственными данными; однако, это следует сделать, если вы собираетесь анализировать его или хотите использовать его в других программах, которые не распознают пространственную привязку, хранящуюся в отдельном файле привязки.
При обновлении пространственной привязки, преобразование будет сохраняться в отдельном файле – новый набор растровых данных создан не будет, как это происходит при сохранении преобразования набора растровых данных. Для набора растровых данных в виде файла, такого как TIFF, преобразование обычно будет записываться во внешний файл формата XML с расширением.AUX.XML. Если набор растровых данных является необработанным изображением, таким как BMP, а преобразование является аффинным, он будет записан в файл привязки. Если набор растровых данных хранится в базе геоданных, при выполнении команды Обновить пространственную привязку , преобразование также будет сохранено в базе, в виде дополнительной информации, относящейся к этому набору растровых данных. Обновление растрового слоя, сервиса изображения или слоя мозаики выполнит обновление слоя внутри документа карты, но не сохранит измененную пространственную привязку в исходном файле.
В таблице ниже показано, как сохраняется каждый целевой тип.
Пространственная привязка различных растров
| Тип данных | Результат |
|---|---|
Набор растровых данных | Команда Обновить пространственную привязку обновляет набор растровых данных. |
Растровый слой | Команда Обновить пространственную привязку обновляет слой растровых данных, растры-источники не затрагиваются. |
Слой сервиса изображений | Сервис изображений на сервере не обновляется. После выполнения команды Обновить пространственную привязку |
Растровый продукт | Растровый продукт не обновляет подлежащие файлы набора растровых данных. После выполнения команды Обновить пространственную привязку можно либо сохранить документ карты (.mxd), либо создать файл слоя (.lyr), чтобы сохранить работу по пространственной привязке. |
Растр с функцией | Растровая функция не обновляет подлежащие файлы растров. После выполнения команды Обновить пространственную привязку можно либо сохранить документ карты (.mxd), либо создать файл слоя (.lyr), чтобы сохранить работу по пространственной привязке. |
Растровая карта в ГИС "Карта 2000" имеет формат RSW. Формат разработан в 1992 году, по структуре близок к формату TIFF версии 6. Основными показателями, характеризующими растровую карту, являются:
- масштаб изображения;
- разрешение изображения;
- размер изображения;
- палитра изображения;
- плановая привязка изображения.
Масштаб изображения - величина, характеризующая исходный материал (в результате сканирования которого было получено данное растровое изображение). Масштаб изображения - это отношение между расстоянием на исходном материале и соответствующим расстоянием на местности.
Разрешение изображения - величина, характеризующая сканирующее устройство, на котором было получено растровое изображение. Величина разрешения показывает, на сколько элементарных точек (пикселей) устройство сканирования разбивает метр (дюйм) исходного изображения. Иными словами данная величина показывает величину "зерна" растрового изображения. Чем больше величина разрешения, тем меньше "зерно", а значит меньше размер объектов местности, которые можно однозначно идентифицировать (дешифрировать)
Размер изображения (высота и ширина) - величины, характеризующие само изображение. По этим величинам можно определить габаритные размеры растрового изображения в пикселях (точках). Размер изображения зависит от размеров сканируемого исходного материала и установленного значения разрешения.
Палитра изображения - величина, характеризующая степень отображения оттенков цвета исходного материала в растровом изображении. Существуют следующие основные типы палитры:
- двухцветная (черно-белая, один разряд);
- 16 цветов (или оттенков серого цвета, четыре разряда);
- 256 цветов (или оттенков серого цвета, восемь разрядов);
- High Color (16 разрядов);
- True Color (24 или 32 разряда).
В случае возможности выбора при сканировании исходных материалов величины разрешения и палитры изображения (некоторые сканирующие устройства работают только с фиксированными значениями), следует учитывать, что при увеличении разрешения и выбора более высокой степени отображения оттенков резко возрастает объем получаемого файла, что в последствии скажется на объемах хранимой информации и скорости отображения и обработки растрового изображения. Например, при сканировании исходных картматериалов нет необходимости применять палитру более 256 цветов, так как реально на обычной карте, как правило, присутствует не более 8 цветов.
Палитра изображения хранится в исходном файле, а разрешение и масштаб будущего изображения следует ввести при конвертировании растра во внутренний формат. Исключение составляют файлы формата TIFF, в которых помимо палитры хранится и разрешение. Для остальных случаев разрешение указывается в соответствии с параметрами, выбранными при сканировании. Например, отечественные барабанные сканеры фирмы КСИ сканируют с разрешением 508 точек/дюйм (или 20000 точек/метр). Если Вы не знаете точное значение масштаба обрабатываемых материалов, следует ввести приблизительное значение (величина масштаба автоматически уточняется в процессе привязки растрового изображения).
Загруженное в систему растровое изображение еще не является растровой картой, так как не имеет плановой привязки. Непривязанное изображение добавляется всегда в юго-западный угол габаритов карты. Поэтому, если вы работаете с большим районом работ, для быстрого поиска добавленного растра можно воспользоваться пунктом "Перейти к растру" меню свойств растрового изображения диалога "Список растров".
После привязки растровая карта становится измерительным документом. По растровой карте можно определять координаты изображенных на ней объектов (при перемещении курсора по растровой карте в информационном поле в нижней части экрана отображаются текущие координаты). Привязанную растровую карту можно использовать как самостоятельный документ или в совокупности с другими данными.
1.2. Конвертирование растровых данных
Cистема Панорама обрабатывает растровые карты, представленные в формате RSW (внутренний формат системы). Данные из других форматов (PCX, BMP, TIFF) могут быть конвертированы в формат RSW с помощью программного обеспечения системы Панорама. Кроме того, системой поддерживается ранняя версия структуры растровых данных RST ("Панорама под MS-DOS") . При открытии файла RST он автоматически преобразуется к формату RSW.
Существует два способа загрузки растрового изображения в систему:
- Открытие растрового изображения как самостоятельного документа (пункт "Открыть" меню "Файл").
- Добавление растрового изображения в уже открытый документ (векторную, растровую, матричную или комбинированную карту).Добавление растрового изображения в уже открытую карту производится через пункт "Добавить - Растр" меню "Файл" или пункт "Список растров" меню "Вид".
1.3. Привязка растровой карты
Привязка растровой карты производится по привязанному документу, т.е. вначале необходимо открыть документ, ориентированный в заданной системе координат (векторная, растровая или матричная карта), добавить в него привязываемый растр и выполнить привязку. Привязать растр можно одним из способов, предоставляемых в свойствах растра ("Список растров - Свойства"). Следует помнить, что все действия над растром, доступные в меню свойств растрового изображения, выполняются над ТЕКУЩИМ растром. Поэтому, если открытый документ содержит несколько растров, следует активизировать (выбрать в списке открытых растров) тот, с которым Вы в данное время хотите работать.
1.3.1. Привязка по одной точке
Привязка производится последовательным указанием точки на растре и точки, куда указанная точка должна переместиться после преобразования (откуда - куда). Преобразование производится путем параллельного перемещения всего растра без изменения его масштаба и ориентации.
1.3.2. Подвинуть в юго-западный угол
Преобразование производится путем параллельного перемещения всего растра без изменения его масштаба и ориентации в юго-западный угол габаритов района работ. Данный режим привязки целесообразно применять, когда к открытой карте Вы добавляете некорректно привязанный растр, который отображается далеко за пределами района работ. В этом случае после перемещения растра в юго-западный угол облегчается его повторная привязка.

1.3.3. Привязка по двум точкам с масштабированием
Привязка производится последовательным указанием пары точек на растре и точек, в которые указанные точки должны переместиться после преобразования (откуда - куда, откуда - куда). Преобразование производится путем параллельного перемещения всего растра с изменением его масштаба. Привязка изображения производится по первой паре указанных точек. Вторая пара точек указывается для вычисления нового масштаба растрового изображения. Поэтому в случае, если у растра значения вертикального и горизонтального масштаба не равны (растр вытянут или сжат вследствие деформации исходного материала или погрешности сканирующего устройства), вторая точка займет свое теоретическое положение с некоторой погрешностью. Для устранения погрешности следует воспользоваться одним из методов трансформирования растрового изображения (прикладная задача "Трансформирование растровых данных").

1.3.4. Поворот без масштабирования
Привязка производится последовательным указанием пары точек на растре и точек, в которые указанные точки должны переместиться после преобразования (откуда - куда, откуда - куда). Преобразование производится путем параллельного перемещения всего растра с изменением его ориентации в пространстве. Поворот осуществляется вокруг первой указанной точки. Привязка изображения производится по первой паре указанных точек. Вторая пара точек указывается для вычисления угла разворота изображения. Поэтому в случае, если у растра значения вертикального и горизонтального масштаба не равны (растр вытянут или сжат вследствие деформации исходного материала или погрешности сканирующего устройства), вторая точка займет свое теоретическое положение с некоторой погрешностью. Для устранения погрешности следует воспользоваться одним из методов трансформирования растрового изображения (прикладная задача "Трансформирование растровых данных").
При загрузке растровых карт в базу данных может
создаваться район работ растровых карт. Для создания растрового района
необходимо последовательно загрузить в систему каждое образующее этот
район растровое изображение и сориентировать его относительно единой системы
координат.
Комбинация растровых и векторных карт на одни
и те же или смежные территории позволяет оперативно создавать и обновлять
районы работ, сохраняя возможность решения прикладных задач, для которых
некоторые виды объектов карты должны иметь векторное представление.
Идея записывать вместе с каждой фотографией координаты точки, в которой они сделаны, возникла еще на заре цифровой фотографии и была почти сразу реализована. Сегодня эта идея пришла в массы и обросла множеством сервисов. С самого начала возникла и сегодня продолжается реализация идеи на аппаратном уровне, когда GPS приемник прямо связывается с камерой, либо он в нее встроен, либо подсоединен к ней через последовательный порт, либо установлен на камеру и получает сигнал о том, что сделан снимок, от синхроконтакта вспышки. Sony выпустила также устройство GPS-CS1, которое записывает просто координаты каждые 15 с, а потом они синхронизуются по времени со сделанными снимками, и информация о координатах записывается в файле. Учитывая, что сегодня и GPS приемники, и камеры стали весьма распространенными и в повседневной жизни, возможно, вам и не придется покупать дополнительное устройство, можно воспользоваться уже имеющимся у вас GPS приемником и камерой, остается только привязать данные о координатах к конкретным снимкам. Раньше было существенное ограничение, связанное с тем, что память GPS навигатора переполнялась, и приходилось каждый день скачивать информацию в компьютер. Если вы снимали редко, а GPS использовался в навигации, то вполне вероятно, что, приехав из похода, вы сможете извлечь информацию только о последнем дне. Сейчас, когда у GPS навигаторов появилась возможность записывать пройденные пути на карты памяти, вопрос ее нехватки практически полностью снят. В Интернете можно найти несколько десятков программ, предназначенных для привязки фотографий к координатам. Более менее полный список можно найти и . Среди них есть и коммерческие, но большинство бесплатные и даже с открытыми исходными кодами. Я попытался попробовать многие их них, однако если по каким-то причинам программа сразу не начинала работать корректно, то я не пытался разобраться, а сразу переходил к следующей. Поэтому весьма вероятно, что среди тех программ, которые я отбраковал, есть и достойные, которые на другой конфигурации оборудования начнут работать сразу и без проблем. Коммерческие программы я тоже не рассматривал, поскольку их демонстрационные версии вносят умышленную ошибку около километра, и мне показалось неразумным тратить на них время при наличии большого количества открытых программ.
Кроме того, число рассматриваемых программ сократилось, поскольку у меня были достаточно специфические дополнительные требования. А именно: для записи координат использовался навигатор Etrex Venture Cx , который сохраняет данные о координатах в формате GPX (GPS Exchange Format). Формат стандартный, но выясняется, что фирма Garmin и некоторые создатели программ этот стандарт понимают по-разному. К счастью, есть универсальные программы, преобразующие один формат в другой. И среди них я бы выделил . В частности, в этой программе можно попросить преобразовать формат GPX, взятый из навигатора Garmin, в тот же самый формат, но результат этого преобразования будут понимать уже все программы.
Второе требование состояло в том, что мне хотелось сразу привязать фотографии в формате RAW, чтобы все полученные из исходных фотографии были уже с помеченными координатами, и не надо было бы снова определять координаты по времени, когда сделан снимок. Потому что с временем, как оказалось, существует довольно много проблем. И если их еще умножить тем, что преобразованные файлы сделаны и обработаны в разное время, и исходная информация времен снимка может быть потеряна или через некоторое время вы не сможете вспомнить, в каком часовом поясе вы снимали. Многие из рассмотренных мной программ имеют довольно изощренные настройки для коррекции возможных проблем с установкой времен. Тем не менее, лучше сразу настроить навигатор и камеру таким образом, чтобы этих проблем не возникало. У моего навигатора есть возможность выбрать способ записи трека - автоматический или через заданный интервал времени. В автоматическом режиме, если вы быстро перемещаетесь, то точек пишется много, если же стоите на месте, то они вообще не пишутся. Это позволяет получить запись пути одинаково качественно, передвигаетесь ли вы пешком, или едете на машине. Однако если вы долго снимаете с одной точки, то может создаться ситуация, когда в момент съемки GPS навигатор не записал координаты, поскольку они не отличались от записанных полчаса назад. Во многих программах можно задать интервал времени, в котором координаты считаются совпадающими со сделанным снимком. Однако отсутствие информации может означать не только то, что вы не перемещались, но и то, что сигнал от спутника был потерян. В этом случае, если интервал достаточно большой, то снимку могут быть приписаны координаты, существенно отличающиеся от истинных. Поэтому я рекомендую установить запись по времени с интервалом в 10 с. Если вы снимаете не из окна автобуса, то точность будет более чем достаточна.
Следующая глобальная проблема - это какое время устанавливать в камере. Если вы путешествуете, или делаете снимки осенью или весной, когда могут перевести время, то устанавливать в камере местное время мне кажется плохой идеей, тем более, что идея местного времени сегодня полностью дискредитирована. Солнце в зените над моим домом в Москве летом в 13 часов 15 минут. Сегодня средства транспорта позволяют перемещаться на многие тысячи километров, и разумнее использовать единое мировое время, а не объяснять, по какому времени и с учетом какого временного периода вы договаривались о встрече. Навигатор ведет протокол по времени UTC (Coordinated Universal Time). Поэтому это же время имеет смысл и выставить на камере и никогда не менять вне зависимости от переездов или времени года. Учитывая, что я записываю координаты с интервалом в 10 с, я предпочитаю называть это время по старинке GMT (Greenvich Meridium Time). Этот вариант более информативен, поскольку означает, что отсчет ведется от местного времени на меридиане Гринвича и при заданной мной точности не отличается от UTC. Зная свои собственные координаты и это время, вы всегда легко можете вычислить, когда же у вас солнце будет в наивысшей точке, то есть местный полдень. Вся эта информация для фотографа отнюдь не бесполезная, поскольку позволяет представить, откуда и куда будет падать свет в предполагаемой точке съемки. Все беды от наук, поэтому, вероятно, люди, обозвавшие утро полднем, стремились побыстрее отправить всех, кто учил в школе географию, в сумасшедший дом.
Итак, если у нас камера и навигатор установлены по единому времени, то в дальнейшем можно игнорировать настройки Часовой пояс. Программы привязки фотографии к координатам
GPicSync
Для начальной пакетной обработки снятых фотографий я выбрал программу .

Спартанский графический интерфейс, работа только с папками, просмотр только JPEG, но свою задачу она выполняет и достаточно быстро. Отмечу, что есть довольно много программ, работающих из командной строки, которые могут поспорить с данной по аскетизму, но я не люблю работать с клавиатурой:-) Программа использует и . Распространяется по лицензии GPL. Есть версии для Windows и Linux. Поддерживается русский язык.
Работает она сразу с папками, позволяет пакетно преобразовывать сразу много фотографий, работает с RAW, понимает файлы GPX от Garmin, записывает координаты в EXIF , позволяет добавлять автоматически в ключевые слова IPTC ближайшие географические названия, которые она берет из баз данных в Интернете. Кроме того, что она записывает информацию о координатах в файлы фотографий, она также создает файл в формате KML или KMZ.
KML (Keyhole Markup Language - язык разметки Keyhole) - язык разметки на основе XML, служащий для представления трехмерных геопространственных данных в программе Google Earth, которая носила название «Keyhole» до её приобретения компанией Google. KMZ являются результатом сжатия KML-файлов ZIP-способом. Подробнее см .
Программа Google Earth распространяется бесплатно .

Если вы хотите в походных условиях (без быстрого интернета) сориентироваться, где же вы сделали снимки, их надо нанести на какую-нибудь карту, которая сохранена у вас в ноутбуке. Для этого можно воспользоваться вышеупомянутой программой GPS Babel и преобразовать в формат WPT для просмотра в программе или снова в формат GPX, но уже с включенными в него путевыми точками, отмечающими сделанные снимки, для просмотра в программе , т. е. нанести фотографии на ту самую карту, по которой вы ориентировались, когда пользовались своим GPS навигатором.

Для работы с отдельными фотографиями может оказаться хорошим выбором программа .

Эта программа написана на Java и, как следствие, одинаково легко запускается без переустановки и под Windows, и под Linux. Кроме того, она распространяется по лицензии GNU General Public License. Программа может все: работать с RAW файлами; просматривать их; записывать координаты в EXIF; просматривать положение фотографий на спутниковых снимках через программу Google Earth; добавлять географические названия в ключевые слова, пользуясь информацией с сайта . Чтобы добиться такой универсальности, программа использует внешние модули сторонних разработчиков, которые надо устанавливать отдельно: , .
Программа позволяет экспортировать фотографии не только в Google Earth, но и, не устанавливая дополнительных программ, контролировать положение точки съемки через .

Из минусов этой программы надо отметить, что она очень медленная, т. е. на подготовку просмотра фотографии в формате RAW может уйти около минуты, и без конвертации не понимает файлы Garmin. Программа используется для связи с GPS приемником а для конвертации файлов ее надо запускать отдельно. Некоторые географические названия могут быть вставлены кириллицей, что можно было бы только приветствовать, но некоторые программы просмотра отказываются работать с такими файлами:-(
Программа очень часто обновляется, так что есть надежда, что она будет совершенствоваться:-)
COPIKS PhotoMapper
Если работать только с файлами в формате JPEG и только под Windows, то неплохим выбором будет программа .

Она же весьма эффективно справляется с задачей упаковки ранее привязанных к координатам фотографий в формат KMZ. Можно посмотреть, как это выглядит, скачав файл в 500 КБ.
Locr GPS Photo
Для последующей обработки и размещения фотографий в интернете может быть полезной программа .

Удобна она и тем, что позволяет накладывать фотографии на космические снимки и карты, предоставленные разными компаниями. Можно выбирать между Google, Microsoft и YAHOO.

Привязывать фотографии с ее помощью я так и не научился, поскольку не нашел способа преобразовать GPX в приемлемый для нее формат NMEA. Поэтому для меня ее основное предназначение размещать фотографии в интернете. Это не единственная служба которая предоставляет подобную услугу, можно размещать фотографии в интернете и на сайте .
Удобным дополнением оказалась программа , которая позволяет редактировать координаты вручную, находить точку съемки в программе Google Earth по данным, записанным в EXIF, а также проводить обратную операцию - записывать координаты найденной на космическом снимке точки съемки в EXIF.

За последний год идея получила бурную поддержку в массах, и скоро любую точку земной поверхности можно будет увидеть не только из космоса, но и с уровня земли. Включив в Google Earth слой «География в интернете/Panoramio», вы увидите, что земля буквально усыпана пометками точек съемки, щелкнув по которым, можно увидеть фотографию.
Часто у нас есть бумажная карта местности и мы хотим добавить эту карту в наш ГИС-проект. Рассмотрим как создать геопривязанное изображение из сканированной или сфотографированной карты на примере карты заказника “Квітуча гора”.
В приведенном примере все выполняется в программе QGIS. В ходе работы будут использованы следующие модули: Привязка растров, QuickMapServices, GeoSearch. Эти плагины нужно установить и активизировать, подробнее про установку модулей можно почитать . Для работы модулей QuickMapServices и GeoSearch необходимо подключение к Интернет.

Следующий шаг – найти на базовой карте интересующую местность. Для этого, внимательно рассмотрев сканированную карту, мы находим на ней название населенного пункта – «с.Мильча».

Зная название села, мы можем найти его при помощи одного из модулей «GeoSearch», «osmSearch» или «OSM place search».

После масштабирования карты к интересующему месту, приступаем непосредственно к привязке карты. Для геопривязки растровых изображений в QGIS есть встроенный модуль «Привязка растров» (Georeferencer). Запускается модуль из раздела меню «Растр» - «Привязка растров».

Модуль «Привязка растров» (Georeferencer) открывается в новом окне.
![]()
При помощи кнопки «Открыть растр» или комбинации клавиш
В верхней части окна появится изображение, в нижней части расположена таблица с описанием точек привязки.

Далее нужно выбрать точки на базовой карте и изображении, по которым будет осуществляться привязка изображения. Обычно это перекрестки и повороты дорог, мосты и другие объекты хорошо видимые на базовой карте и привязываемом изображении.
Увеличиваем экстент базовой карты к первой точке привязки. Так же увеличиваем привязываемое изображение к выбранной точке привязки. Приблизившись в окне модуля к точке привязки, нажимаем кнопку «Добавить точку» и клацаем указателем мышки по выбранной точке. После этого открывается форма ввода координат. Координаты можно ввести как через поля ввода, так и захватить с карты. Если у нас есть координаты точек, например, полученные при помощи GPS-навигатора, мы можем их внести в соответствующих полях. Для получения координат с базовой карты нажимаем кнопку «С карты».

После нажатия кнопки «С карты» автоматически открывается основное окно QGIS. В нем курсор мышки имеет вид белого крестика. Выбираем точку привязки на базовой карте и жмем левую кнопку мышки.

После нажатия, автоматически возвращаемся в окно модуля привязки растров. В форме ввода появились значения координат точки. Заполненные значения имеют систему координат проекта с базовой картой.

После нажатия точка добавляется в таблицу с описанием точек привязки. Таким образом добавляем как можно больше точек привязки. Точки желательно расположить равномерно по привязываемому изображению. Чем более искажено исходное изображение, тем больше требуется точек привязки. Минимальное количество точек привязки — 3.

Далее задаем параметры трансформации. Для этого нажимаем шестеренку на панели инструментов. В открывшемся окне задаем следующие обязательные значения: тип трансформации, метод интерполяции, целевую систему координат, целевой растр. Остальные параметры являются не обязательными и их можно оставить со значениями по умолчанию.
Качество привязки зависит от количества точек привязки и от выбора метода трансформации. Подробнее про методы трансформации можно почитать .
![]()
Одним из ключевых моментов является правильное указание целевой системы координат. Если вносили координаты полученные при помощи GPS-навигатора, то указываем систему координат заданную в настройках GPS-навигатора, наиболее часто это WGS 84 (EPSG:4326). Если мы брали координаты с карты, то указываем систему координат рабочего проекта. В нашем случае это WGS 84 / Pseudo Mercator (EPSG:3857) которая является «родной» для таких карто-сервисов как OpenStreetMap, ArcGIS Online и многие другие.

Задав параметры трансформации запускаем процесс привязки, нажав зеленый треугольник на панели инструментов или выбрав соответствующий пункт в меню «Файл». В результате привязки растров будет получен файл в формате GeoTIFF.
Если в окне параметров трансформации вы отметили пункт «Открыть результат QGIS» то после окончания процесса привязки результирующий слой будет добавлен в рабочий проект поверх базовой карты.
Важным нюансом является то, что в результате работы модуля, результирующий растр имеет систему координат указанную в параметрах трансформации, но информация про то какая именно проекция растра, в нем не содержится. По этой причине, он может присутствовать в списке слоев, но не отображаться на карте. В таком случае необходимо зайти в «свойства слоя» и указать нужную систему координат вручную.

После явного указания правильной системы координат изображение расположится на нужном месте.

Настроив прозрачность мы можем скрыть черные поля по краям привязанного изображения, возникшие в результате трансформации.
![]()
Так же можем проверить корректность привязки, указав прозрачность слоя в 50%.
![]()
Завершающим штрихом может стать запись информации про проекцию непосредственно в файл геопривязанного изображения в формате GeoTIFF. Для этого выберем меню «Растр» - «Проекции» - «Назначить проекцию». В открывшемся окне выбираем наш геопривязанный файл и систему координат. Так же мы можем использовать этот инструмент для каталогов с растрами, отметив соответствующий пункт, и если необходимо, в ручную задать параметры программы gdalwarp. Подробней про параметры gdalwarp можно почитать .

После внесения информации про систему координат в файл геопривязанного изображения, мы сможем открывать его в других ГИС-проектах и ГИС-программах без дополнительных манипуляций по ручному указанию системы координат.
Так же мы можем обрезать привязанное изображение до интересующей территории, как это описано и загрузить на планшет или сматрфон, как это описано .







Обзор Samsung Galaxy A7 (2017): не боится воды и экономии Стоит ли покупать samsung a7
Делаем бэкап прошивки на андроиде
Как настроить файл подкачки?
Установка режима совместимости в Windows
Резервное копирование и восстановление драйверов Windows