В среду в Звездном городке журналистам был представлен прототип робота-андроида SAR-401. Этот робот является опытным прототипом для создания летного экземпляра, который впоследствии планируется отправить на МКС. Им можно будет управлять в двух режимах: основном - с борта МКС и резервным - из подмосковного Центра управления полетами.
Женщина-робот AILA, созданная в Немецком исследовательском центре искусственного интеллекта DFKI, «оснащенная» сенсорными пальцами. Разработчики говорят, что главная цель состоит в том, чтобы адаптировать систему памяти робота к обучению и запоминанию человеческого поведения, чтобы обеспечить его практическое использование. AILA может воспроизводить «увиденные» движения, прикасаться и обращаться со многими различными предметами так, как нужно с ними обращаться. Например, робот может понимать, что бутылка
Роботы настолько хорошо осваивают творчество, что некоторые из них добиваются всемирной славы. Так, группа Z-Machines, полностью состоящая из роботов, возглавила концертную программу во время японской выставки Maker Faire в Токио в 2013 году. Коллектив состоит из трех машин: робот-гитарист Мах, робот-барабанщик «Ашура» и робот-клавишник «Космос».
У известного японского актера Кена Мацудайра есть двойник-робот, который был разработан специально для съемок рекламы японской телекоммуникационной компании KDDI.
В мае в Германии во время финала шоу «Следующая топ-модель Германии» один из роботов-финалистов удостоился поцелуя Хайди Клум.
Самые популярные роботы в Японии — танцующие. Эти роботы умеют танцевать а-ля Майкл Джексон, рассказывать истории, играть в различные игры и имитировать движения.
Промышленные роботы - главные помощники человека. Это автономное устройство, состоящее из механического манипулятора и системы управления, которое применяется для перемещения объектов в пространстве и для выполнения различных производственных процессов. Промышленные роботы могут выполнять основные технологические операции (сварка, окраска, сборка) и вспомогательные технологические операции (загрузка-выгрузка технологического оборудования, транспортные).
В Москве в октябре на сцене «Школы драматического искусства» был показан спектакль «Три сестры. Андроид-версия». В постановке пьесы Антона Чехова японский театральный новатор Ориза Хирата соединил драматургию и высокие технологии – вместе с артистами на сцене находился андроид Geminoid F и робот-слуга Robovie R3. Техническим консультантом спектакля стал один из ведущих исследователей в сфере робототехники Хироси Исигуро, известный созданием точной копии самого себя.
Человекоподобный робот Rapiro может быть не только игрушкой. Его создатель, японский инженер Сота Исиватари (Shota Ishiwatari) рассказал, что робот может предупреждать вас о получении уведомлений в Facebook и Twitter, а также сообщений электронной почты. А если установить на Rapiro видеокамеру, робот сможет патрулировать квартиру.
Самый заботливый в мире робот — НАО. Робот распознает речь, лица и даже текст. Основное инновационное отличие НАО от многих других роботов – это то, что он запрограммирован на самообучение. Собирая данные об окружающем мире и, обрабатывая их, робот выстраивает собственное представление о мире, и учится предсказывать последствия собственных действий. Когда НАО грустит, он подает плечи вперед и опускает голову; в добром расположении духа он поднимает руки и даже тянется с объятиями. А если НАО испугать, то он съежится и будет сидеть в таком положении, пока кто-нибудь его не разбудит, ласково похлопав по макушке.
Японец Хитоси Такахаси (Takahashi) 11 лет своей жизни потратил на разработку механического жука массой 17 тонн и еще 3 года на то, чтобы его собрать и довести до ума. Робот получил название Kabutom RX-03 и по внешнему виду напоминает космическое средство передвижения из будущего.Конструкция оборудована 6 лапами и дизельным двигателем, приводящем ее в движение. На себе этот «механический жук» способен перевозить до 6 взрослых человек.
Робот, разработанный исследователями Боннского университета, - это больше, чем очередной андроид для весьма популярных соревнований RoboCup. Он сочетает в себе серьёзные технические достижения и одновременной простой дизайн. Футбол роботов — сочетание сноровки и искусственного интеллекта. Куда бежать и где мяч — до всего этого роботы доходят своими мозгами, вернее, программой, которую заложили в них специалисты.
Что это?
Это статья об индустриальном применении робототехники. Применение роботов в промышленности началось, по историческим меркам, не так давно - чуть больше, чем полвека назад, но сейчас уже мало какое производство можно представить себе без автоматических линий, без стальных манипуляторов и зорких стеклянных зрачков роботов - эти железные ребята прочно вошли в большинство производственных процессов и уходить не собираются.Несмотря на такое обширное, почти повсеместное распространение роботов, лишь специалисты в полной мере представляют себе весь спектр их возможностей. В этой статье мы приоткроем дверь в мир промышленной робототехники для широкого круга читателей: опишем некоторые разновидности производственных роботов и сферы их применения. Нельзя объять необъятное в одной статье, но, если читателям будет интересно, мы обязательно продолжим.
Так какие они бывают - роботы?
Есть несколько классификаций промышленных роботов: по типу управления, по степени мобильности, по области применения и специфике совершаемых операций.
По типу управления:
Управляемые роботы: требуют, чтобы каждым их движением управлял оператор. В силу узости областей применения распространены мало. Да и не совсем роботы.
Автоматы и полуавтономные роботы: действуют строго по заданной программе, зачастую не имеют сенсоров и не способны корректировать свои действия, не могут обойтись без участия рабочего.
Автономные: могут совершать запрограммированный цикл действий без участия человека, согласно заданным алгоритмам и корректируя свои действия по мере необходимости. Такие роботы способны полностью перекрыть поле деятельности на своем участке конвейера, без привлечения живой рабсилы.
По функциям и сфере применения:
Роботы разделяются по назначению и исполняемым функциям, вот лишь некоторые из них: промышленные роботы бывают универсальные, сварочные, машиностроительные, режущие, комплектовочные, сборочные, упаковочные, складские, малярные.
Это далеко не полный перечень: количество всевозможных вариантов постоянно растет и все перечислить невозможно в рамках одной статьи. Можно лишь с уверенностью сказать о том, что вряд ли найдется такая область человеческой деятельности, где роботы не смогли бы сделать труд человека более творческим, взяв всю монотонную и опасную часть работы на себя.
Другие методы классификации
У каждой энциклопедии, каждого справочника и каждого производителя своя классификация и типология роботов. Что и не удивительно - зачастую она определяется сугубо специфическими нуждами и частным подходом того, кто её составляет.
Помешает ли это нам рассмотреть некоторые образцы и понять - что же они умеют? Нет. Начнем.
Рассмотрим образцы
Среди промышленных роботов широко известна продукция таких фирм, как Kuka, Fanuc, Universal Robots, некоторые образцы которых мы рассмотрим чуть ниже.
Очень интересным представляется подход компании Stratasys, которая создала промышленный аппарат нового типа - гибрид робота и 3D-принтера.Конечно, любой 3D-принтер обладает признаками робота, но тут - это совершенно традиционной формы роботизированный манипулятор, имеющий в том числе и функцию FDM-печати. Stratasys Infinite-Build 3D Demonstrator предназначен, прежде всего, для авиационного и космического производства, в котором так важна его способность производить печать на вертикальных поверхностях неограниченной площади, в соответствии с концепцией “infinite-build” - “бесконечное построение”. С работой над проектом связаны такие монстры, как аэрокосмический гигант Boeing и автоконцерн Ford, которые предоставили Stratasys спецификации по необходимым характеристикам получаемых изделий.Восьмиосевой механизм манипулятора, обилие специально разработанных композитных материалов для печати, традиционно высокое качество изготовления - все говорит нам о том, что у этого аппарата и его потомков большое будущее. 3D Systems - Figure 4
Figure 4 компании 3D Systems - модульная робототехническаяя система для автоматизации стереолитографической 3D-печати, ни больше, ни меньше.
Это целый автоматический комплекс, который способен производить новые изделия каждые несколько минут - в отличие от нескольких часов на обычных SLS-принтерах.
Кроме того, в цикл уже включены и такие этапы, как промывка, отделение поддержек и дозасветка, а не только первичная экспозиция. Все это Figure 4 делает сам, без вмешательства оператора в процесс работы.Благодаря модульности, на основе Figure 4 можно создать достаточно крупные автоматические линии, используя стандартные компоненты.
Этот комплекс был представлен общественности в этом году, на выставке The International Dental Show в Кёльне, как и новый 3D-принтер ProJet CJP 260Plus - полноцветный 3D-принтер предназначенный для анатомического моделирования медицинских изделий и быстрого прототипирования любых промышленных образцов.Принтер также роботизирован - снабжен системой автоматической загрузки, удаления и переработки печатного порошка.Можно с уверенностью сказать, что комплексный подход к 3D-печати - часть производственной культуры будущего. Он даст радикально новое сочетание скорости, точности, удобства и снижения себестоимости изделий.
Carbon - Carbon SpeedCell
Carbon SpeedCell - технологическое решение от компании Carbon, которое включает в себя новый 3D-принтер The M2, работающий по технологии CLIP, и финишинговый аппарат для стереолитографических распечаток Smart Part Washer.
CLIP - технология бесслойной стереолитографической печати, обеспечивающая скорость от 25 до 100 раз быстрее обычной SLS и новый уровень качества поверхности.Система CLIP (Continuous Liquid Interface Production) позволяет получить невозможные ранее формы изделий требующие минимальной постобработки. Точных характеристик аппаратного комплекса производитель пока не предоставил, но сам подход уже радует - это почти готовое решение для любой мастерской, в которой требуется стереолитографическая печать.
DMG MORI - LASERTEC 65 3D
Аппарат сочетающий в себе несколько разных подходов к обработке деталей: это и классический фрезерный станок с программным управлением - пятиосевой и весьма точный, и лазерный режущий инструмент с теми же степенями свободы, и печатающий металлом 3D-принтер с технологией лазерного напыления. Сложно представить себе операцию, которую не смог бы произвести этот станок с металлической деталью. Гибридный подход: фрезеровка заготовки, наплавление недостающих деталей или печать с нуля и чистовая обработка - все операции могут произведены с деталью за один подход, в рамках одной заданной программы, без прерывания технологического цикла. Размер обрабатываемой и/или печатаемой детали составляет до 600 на 400 мм, а вес может быть до 600 кг.Такое МФУ для работы по металлу уже многое изменило в культуре производства штучных и мелкосерийных изделий, а в ближайшее время подобный подход может распространиться и на серийное производство.
EOS - Additive Manufacturing
Компания EOS создала манипуляторы, которые способны производить различные операции, где требуется захват и перемещение детали. Разработки EOS в этой области основываются на наблюдениях за поведением животных, в частности - этот манипулятор создан по примеру хобота слона.Такой робот-манипулятор может быть использован во множестве промышленных операций, как то: в транспортировке и упаковке, в перемещении деталей из одной рабочей зоны в другую, например - из 3D-принтера в камеру пост-обработки, чтобы исключить участие человека на этом этапе.
Вот так он устроен:Также компания спонсирует и представляет проект Roboy - это мобильный гуманоидный робот, который способен выполнять любые движения свойственные человеку и служить помощником на производстве.
Concept Laser и Swisslog - M Line Factory
Известный производитель печатающих металлом 3D-принтеров, Concept Laser заключил соглашение с компанией Swisslog, их общий проект - M Line Factory, это система перемещения металлических 3D-печатных деталей между станками Concept Laser с помощью роботов Swisslog.Компании продолжают совершенствование аппаратных комплексов для 3D-печати металлом. Роботизированные составляющие этих машин способны провести деталь через весь цикл - от загрузки проекта в память, до выхода готового изделия на склад, - без необходимости вмешательства оператора.
Additive Industries - The MetalFAB1 Единственная в своем роде установка - единая система для печати, транспортировки из рабочей камеры и хранения готовых деталей. Фактически - готовый цех металлической 3D-печати в одном корпусе.Существуют роботы, которые способны выполнять функции сварочных и фрезерных станков c программным управлением.А также такие, которые обслуживают традиционные фрезерные ЧПУ-станки, увеличивая их производительность.Вот так с этим справляется упомянутый выше Sawyer:Выводы:
Роботы в современной промышленности везде. Они в любом цеху и в любой области производства. И это нормально: роботы экономят деньги работодателей, а рабочих спасают от вредной и монотонно-отупляющей работы; роботы работают круглосуточно и безостановочно; роботы намного точнее живых рабочих - они не устают, у них не “замыливается глаз”, их сенсоры и системы позиционирования способны сохранять точность до сотых долей миллиметра.
Пока мы видим их еще не везде - многие производственные процессы скрыты от рядового пользователя, да и не особо интересны обычно, - но совсем скоро невозможно будет не замечать того, что подавляющая часть всех материальных благ производится умными машинами.
Хотите больше интересных новостей из мира 3D-технологий?
Достижения в области робототехники постоянно происходят в области освоения космоса, здравоохранения, общественной безопасности, развлечений, оборона, и многих других. Некоторые из этих машин полностью автономны, некоторые требуют человеческого участия. Но все они созданы, чтобы расширить человеческие возможности, могут перемещаться и проникать в сложные либо опасные места, куда не попасть нам самим. Здесь собраны роботы, которые были созданы за последние пару лет.

Двуногого человекоподобного робота «Атлас» разработала американская робототехническая компания Boston Dynamics. Он был представлен СМИ в ходе пресс-конференции в the University of Hong Kong, 17 октября 2013 года. Высота этого робота 1,83 метров в высоту, масса 149,7 кг. Робот сделан из алюминия и титана, и обошелся он в 1,93 млн. долларов. Он способен выполнять разнообразные движения, которые естественны для человека, как ходьба или гимнастика.

22-х летний французский пациент Флориан Лопез держит ветку дерева его новой бионической рукой в центре реадаптации Coubert к юго-востоку от Парижа, 3 июня 2013 года. Лопез потерял три пальца в результате несчастного случая в конце 2011 года, и стал первым французским пациентом, получившим такую искусственную конечность. Стоимость такой механической рукой составляет 42 000 евро, и уже используется в Шотландии и США.

MVF-5 — многофункциональная роботизированная система пожаротушения, разработанная компанией Dok-Ing тушит автомобиль из водяной пушки. Она была представлена на ежегодной конференции по теме «Робототехника в чрезвычайных и кризисных ситуациях, использование военных роботов для гражданской защиты» в городе Bouches-du-Rhone на юге Франции.

Мужчина держит на руках робот Telenoid R1 на ярмарке Инноваций Робототехники Innorobo 2013. На данной конференции компании и исследовательские центры представляли свои новейшие технологии в области робототехники, 19 марта 2013 года в Лионе. Робот Telenoid R1 предназначен как робот телеприсутствия, т.е. для того, чтобы имитировать присутствия удаленного человека, например, внука. И позволяет людям общаться в более естественной обстановке.

Два четвероногих робота, бегущих через поле во время тестирования. Подобные полуавтономные машины созданы, чтобы помочь перевозить тяжелые грузы по пересеченной местности, взаимодействуя подобным образом с войсками, вместо настоящих животных.

9 октября космический корабль НАСА «Юнона» пролетал рядом с Землей, чтобы использовать ее гравитацию для разгона, и отправился к Юпитеру. Камера «Юноны» запечатлела в этот момент Землю для того, чтобы проверить приборы и убедиться, что все идет по плану. Корабль Юнона был запущен НАСА с космического Центра Кеннеди во Флориде 5 августа 2011 года. Ракета Юноны Atlas 551, была способна дать Юноне разгон, достаточный только для того, чтобы он достиг пояса астероидов. После чего сила притяжения Солнца вновь заставила Юнону вернуться к внутренней части солнечной системы. Гравитация Земли гравитационной увеличит скорость корабля, чтобы он смог взять курс на Юпитер, и достигнет его 4-го июля 2016 года.

На этом фото, сделанном 6 октября 2013, лазерные лучи освещают робота во время выступления в ресторане Токио.

Робот SWAT с дистанционным управлением — это маленький управляемый танк со щитом для полицейских. Он был продемонстрирован в Санфорде, штат Мэн 18 апреля 2013 года. Его компания-создатель говорит, что их устройство поможет бригадам спецназа и другим службам экстренного реагирования защищаться при задержке вооруженных противников.

Прототип роботизированного угря в бассейне внутри института машиностроения Нового Орлеана 2 октября 2012 года. Робот-угорь может пробираться через опасные воды почти незаметно, двигаясь на малой скорости. Что не позволяет обнаружить его с помощью систем радиолокационного обнаружения, какие имеются у глубоководных мин.

Президент США Барак Обама пожимает руку робота на научной ярмарке проектов в Государственной Столовой Белого Дома в Вашингтоне, округ Колумбия на 22 апреля 2013 года. Обама посещал в Белом Доме Научную Ярмарку и поздравлял победителей соревнований в различных областях науки, технологии, конструирования и математики (STEM) со всей страны.

Робот-дракон на средневековом зрелище «Драконье Жало» поджигает елки в Furth im Wald, Германия, 24 января 2013 года.

Роботизированная летающая платформа с камерой снимает водителя Норвегии Андреаса Миккельсена и финского штурмана Микко Марккула на автомобиле Volkswagen Polo R WRC во время отборочного этапа чемпионата Мира FIA по Ралли Италии на итальянском острове Сардиния на 20 июня 2013 года.

Роботизированные подвижные цели, установленные для использования как движущиеся мишени в целях теста на 2 базе морской пехоты в Куантико, Вирджиния 24 сентября 2013 года. Роботы, разработанные австралийской компанией «Марафон» ростом со среднего человека, падают при попадании выстрелов, и могут двигаться со скоростью ходьбы или бега. Подобный тест — наиболее эффективный метод для обучения стрельбы по движущимся мишеням из карабина М4 или автомата М27.

Роботы доставляют блюда клиентам в роботизированном ресторане в Харбине, КНР 12 января 2013 года. Ресторан был открыт в июне 2012 года, и сразу же стал известен, благодаря использованию 20 роботов, ростом 1,3-1,6 м, которые умеют готовить и доставлять блюда. Роботы могут работать непрерывно в течение пяти часов после двух часов зарядки, и способны отображать более 10 выражений эмоций на их лицах, и произносить основные фразы приветствия клиентам.

Мобильная рыбная система, разработанная компанией Lockheed Martin, постоянно перемещается по поверхности океана, в водах более 12000 футов глубиной. Она совершает работу по решению потенциальных проблем, связанных с воздействием на качество воды или воздействия на морское дно. Система работает за счет интеграции спутниковой связи, дистанционного зондирования земли, управляется двигателем и имеет программное обеспечение для описания ситуации.

Робот-очиститель Toshiba для работы внутри АЭС во время демонстрации в техническом центре компании Toshiba в Йокогаме 15 февраля 2013 года. Робот на гусеницах разбрасывает сухой лед для удаления частиц загрязнения полов и стен. Он будет использоваться для очистки последствий атомной электростанции Фукусима.

Датский ученый Генрих Scharfe (справа) позирует с его роботом Geminoid-DK во время презентации на Национальной Робототехнической Олимпиаде в Сан-Хосе 16 августа 2013 года. Робот Geminoid-DK выглядит как точная копия своего творца, профессора Scharfe.

Этот снимок НАСА — это одна из серии фотографий, заснятой в процессе расстыковки корабля SpaceX Dragon-2 с Международной Космической Станцией 26 марта 2013 года. Космический корабль, наполненный экспериментами и старыми запасами, можно увидеть в руке робота-манипулятора CanadArm2 после того, как он был отстыкован от космической станции. «Дракон» должен будет совершить посадку в тихом океане у берегов Калифорнии позднее в тот же день. В центре фото можно наблюдать Луну.

Зак Вотер, 31-летний программист из Сиэтла готовится подняться на 103 этажную Уиллис-Тауэр с помощью первой в мире нейронной контролируемой бионической ноги в Чикаго 4 ноября 2012 года. По данным Чикагского института реабилитации, их Центр бионической медицины занимается разработкой технологии, которая позволяет людям с ампутированными конечностями, таким как Вотер лучше контролировать протезы собственным разумом.

Верблюды, оседланные роботами-жокеями, во время еженедельных верблюжьих гонках в Кувейте 26 января 2013 года. Роботы управляются погонщиками, которые следуют в своих автомобилях сзади на протяжении всего трека.

ГРОВЕР — новый дистанционно управляемый аппарат для изучения и исследования вершин в Гренландии, 10 Мая 2013 года. ГРОВЕР является автономным управляемым роботом на солнечных батареях, и везет радиолокационное оборудование для изучения ледникового щита Гренландии. Его результаты помогут ученым понять, как тают массивные ледяные покровы. После загрузки и тестирования Гровера, команда начала тестировать робота на льду 8 Мая, при ветре, скоростью до 37 км/ч и температуре наружного воздуха до минус 30 градусов Цельсия.

Человекоподобный робот-бармен «Карл» жестикулирует перед гостями в Робот-Баре в восточном немецком городе Ильменау 26 июля 2013 года. «Карл», разработанный и построенный компанией «Мехатроника» инженером Бен Шефер, готовит коктейли, и может вести небольшие беседы с клиентами.

X-47B, демонстрационные запуски с авианосца ВМС США «CVN 77». После завершения своего первого полета, совершил посадку на взлетной палубе авианосца. Посадка данной роботизированной системы — это первый случай посадки беспилотного самолета в море.

Робот помогает пассажирам найти свой путь через зону получения багажа Женевского Международного Аэропорта 13 июня 2013 года. Робот создан, чтобы сопровождать путешественников до различных объектов, таких как багажное отделение, банкомат, душевые и туалеты.

Вид из передней камеры Марсохода НАСА 29 августа 2013 г. Действующий по сей день марсоход ездит по поверхности Марса для сбора данных уже почти 10 лет, с момента его посадки января 2004 года.

Компания Kokoro представляет человекоподобного робота, которого зовут «Actroid» (слева) и его внутреннее устройство (в центре) в штаб-квартире компании в Токио 7 февраля 2013 года.

Россер Прайор, совладелец и президент компании «Автоматизация», сидит рядом с новым высокопроизводительным промышленным роботом в Атланта-центре 15 января 2013 года. Прайор, который уволил 40 из 100 работников со времен рецессии, говорит, что компания зарабатывает достаточно, чтобы нанять еще десяток человек, но он вкладывает деньги в автоматизацию и программное обеспечение.

Китайский изобретатель Tao Xiangli собирает компоненты для его самодельного робота во дворе его дома в Пекине 15 Мая 2013 года. 37-летний китаец потратил порядка 24 тысяч долларов, и около года работы, чтобы собрать робота из переработанного лома металлов и электрических проводов, которые он приобрел на вторичном рынке. Робот 2.1 метра в высоту и весит около 480 килограммов.

Фотографы фотографируют нового четвероногого робота корпорации Toshiba, который, как говорит компания, способен выполнять восстановительные работы последствий цунами на Фукусиме. Новый робот умеет ходить на неровных поверхностях, обходить препятствия и подниматься по лестнице. Робот оснащен камерой и дозиметром, и может передвигаться в условиях атомной электростанции, через дистанционное управление.

Робот осматривает руины входа в туннель в археологической секции Храма Кецалькоатля возле Пирамиды Солнца в Теотиуакане на археологических раскопках, примерно в 60 км к северу от Мехико, 22 апреля 2013 года. Робот обнаружил три древние камеры в последней секции неизведанных туннелей в знаменитом Теотиуакане. Это первое подобное открытия роботов в этой латиноамериканской стране.

Инженер делает настройку робота «Невероятный Бионический Человек» в Смитсоновском Национальном музее авиации и космонавтики в Вашингтоне, округ Колумбия 17 октября 2013 года. Впервые в мировой истории, был создан робот путем искусственной имплантации человеческих органов.
В современном мире нас всюду окружают машины и механизмы различных типов, однако роботы среди них пока еще довольно редкие гости. И это неудивительно, ведь главное отличие этих агрегатов от других - интеллект, который до сих пор в полной мере не познан самими создателями. И пусть современным роботам пока еще далеко до искусственных гуманоидов из фантастических романов и фильмов, но с каждым годом они становятся все более и более совершенными.
Рутинная работа, которая не требует творческого подхода, - это идеальное место для интеллектуальных машин.
Борьба с рутиной, безусловно, актуальное направление развития, но куда более важными являются сферы деятельности, сопряженные с непосредственной опасностью для жизни, поэтому полеты в космос стали одной из первых областей применения роботов. Именно здесь впервые были полноценно использованы дистанционно управляемые роботизированные станции, и чем дальше человек отправлял механических исследователей, тем более важной становилась возможность автономного принятия решений машиной. Ведь, скажем, даже до Луны сигнал с Земли идет с существенной задержкой, что уж говорить о Марсе или других планетах.
Если взглянуть глубже, основным назначением роботов, безусловно, является в первую очередь помощь человеку, в связи с чем они находят в нашей повседневной жизни все больше и больше применения.
Еще десять лет назад казалось фантастикой, что можно будет зайти в ближайший магазин бытовой электроники и купить там робота-уборщика, а теперь ползающие по квартире роботы-пылесосы уже стали привычными даже для домашних животных, которые с удовольствием используют их в качестве аттракционов.
Более того, сегодня уже используются роботы-официанты, роботы-повара в ресторанах, роботы-дворецкие и т. д. - мы расскажем вам о самых любопытных моделях.
1. Больше, чем игрушка
В 2008 году французская компания Aldebaran Robotics выпустила миниатюрного робота Nao . Этот почти игрушечный 57-сантиметровый аппарат оказался столь удачным, что разошелся по всему миру и стал основной платформой ежегодных соревнований RoboCup.
Помимо возможности свободно двигаться и общаться с хозяином с помощью речевых команд Nao обладает интерфейсом интерактивного программирования. С помощью специальной программы робота можно научить выполнять нужные операции в зависимости от заданных условий, например, принести какой-нибудь предмет.
2. Нескучный космос
Как ни странно, использование роботов в космосе не ограничивается лишь утилитарными функциями. Так, японское космическое агентство запустило на МКС робота Киробо , созданного с единственной целью - развлекать людей общением.
Томотака Такахаси, дизайнер из подразделения автоконцерна Toyota, создал Киробо по мотивам персонажа аниме «Астробой» (Astro Boy), знакомого каждому японскому мальчишке. Этот робот-собеседник не давал скучать японскому космонавту Коити Вакате во время его полета, завершившегося прошлой весной.
С тех пор уже сам механический Астробой пребывает на орбите в гордом одиночестве. Вернуть робонавта на Землю планируют в 2015 году.

3. Роботизированный ресторан
Ресторан в городе Куншан в КНР может похвастаться не только вкусной едой, но и очень оригинальным персоналом: вместо привычных официантов еду посетителям в нем разносят роботы . Кроме того, некоторые блюда также приготовлены роботами-поварами.
Владелец ресторана Сон Юган рассказывает, что занялся разработкой роботов по просьбе дочери, которая попросила его сделать робота-помощника по дому. По его словам, стоимость каждого робота составляет около 40 000 юаней, что не превышает годовую оплату обычного сотрудника. В то же время роботы - отличный способ привлечения в ресторан посетителей.

4. Роботы-дворецкие
В отеле «Алофт» в Купертино часть обязанностей персонала взяли на себя роботы A.L.O. , разработанные компанией Savioke. Так, если вам понадобится лишнее полотенце или тюбик зубной пасты, вам доставит ее весьма симпатичный электронный дворецкий. Этот робот взаимодействует с компьютерной системой отеля с помощью Wi-Fi и 4G, что позволяет ему удаленно вызывать лифты и находить нужные комнаты.

Роботы. Пока еще это экзотика, но тем не менее, они все увереннее входят в нашу жизнь. Три закона роботехники Айзека Айзимова скоро перестанут быть только развлекательной литературой. Роботы – существа, которые одновременно завораживают и пугают своей человечностью и одновременно машинностью. Производство роботов развивается постоянно. Посмотрите на десятку самых интересных экземпляров на сегодняшний день.
ASIMO: Робот-гуманоид
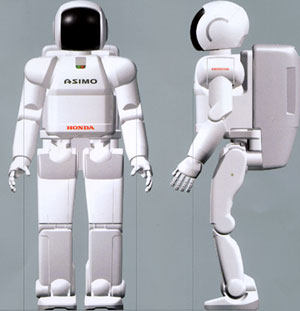
ASIMO – это робот-гуманоид, созданный компанией Хонда. Ростом в 130 сантиметров и весом в 54 килограмма, робот похож на маленького астронавта, который несет рюкзак. Он умеет ходить на двух ногах, копируя человеческую походку скоростью в 6 км/ч. ASIMO был создан в Японии в «Центре исследований и развития» Хонды. Эта последняя модель в серии, а всего их одиннадцать, первый робот был создан в 1986 году.
Официально имя робота – это сокращение от "Advanced Step in Innovative MObility", то есть буквально «Продвинутый шаг в передовой мобильности».в 2002 году существовало 20 роботов ASIMO. Каждый стоит миллион долларов за производство, и некоторые экземпляры можно взять напрокат за 150 тысяч долларов в месяц.
Распознавание движущихся объектов
Используя зрительную информацию, которую собирает вмонтированная в голову робота видеокамера, ASIMO распознает движения множества объектов, а также оценивает расстояние от них и их направление. С помощью комплекса этих технологий робот может следить за перемещениями людей камерой, следовать за человеком или поприветствовать его, когда он приближается.
Распознавание поз и жестов
ASIMO умеет интерпретировать позиции и движения руки, распознавать позы и жесты. Благодаря чему робот может реагировать не только на голосовые команды, но и на естественные телодвижения людей. Таким образом он, например, понимает, когда ему предлагают рукопожатие или когда человек ему машет, и отвечает взаимностью. Кроме того, он понимает, когда ему указывают направление движения.
Распознавание окружающей среды
ASIMO умеет анализировать окружающие объекты и ландшафт и действовать так, чтобы это было безопасно для него и находящихся рядом людей. Например, он узнает потенциально рискованные объекты, такие, как лестницы, а также останавливается или обходит людей и другие движущиеся объекты, чтобы не столкнуться с ними.
Распознавание звуков
Возможности робота распознавать род звуков углубились, и теперь он знает разницу между голосами и прочими звуками. Он отвечает на свое имя, поворачивается лицом к человеку, с которым разговаривает, реагирует на внезапные необычные звуки вроде упавшего предмета или столкновения, и поворачивает голову в этом направлении.
Распознавание лиц
ASIMO может узнавать человеческие лица, даже когда человек двигается. Он может отдельно различать 10 человеческих лиц. Когда их зарегистрируют в его памяти, он будет обращаться к ним по имени.

Albert Hubo: робот-Эйнштейн

Робот Альберт Хубо (Albert HUBO) – андроидный робот. Его внешний вид составляет голова, которая копирует голову ученого Альберта Эйнштейна, и туловище довольно известного гуманоидного робота Хубо. Период разработки составил три месяца и завершился в ноябре 2005 года. Голова была разработана компанией Hanson-Robotics. Тело сделано из специфического материала, Frubber, который частенько используют в Голливуде.
Голова имеет 35 суставов, благодаря чему может выражать различные эмоции на лице, пользуясь независимыми движениями глаз и губ. Также в голове есть две CCD камеры для визуального распознавания. Кроме того, Альберт умеет вытворять все присущие Хубо представления, поэтому возможно выражать еще больше естественных человеческих движений и манер поведения. В теле спрятаны полимерные литиевые батареи, которые обеспечивают около двух с половиной часов автономной работы робота.
С помощью удаленной сети роботом Альбертом можно управлять из внешнего компьютера. Впервые Альберт Хумо был представлен в 2005 году на саммите АПЕК в Пусане (Корея). Его похвалили многие мировые лидеры: президент США, премьер-министр Японии и т.п.

Stanley: самоуправляемое транспортное средство

Стэнли (Stanley) – это автономное средство передвижения, созданное гоночной командой Стэнфордского университета. Это обычный Фольксваген Туарег, доработанный до возможности управления только бортовыми компьютерами. Он принимал участие и победил в DARPA Grand Challenge в 2005 году и принес Стаэнфордской гоночной команде приз размером в два миллиона долларов, самый большой денежный приз за всю историю роботов.
Сенсоры, использованные в Стэнли, включают в себя пять лазерных лидаров, пару радаров, стереокамеру и однообъективную камеру. Обрабатывают информацию и определяют позицию машины GPS-приемник, GPS-компас, инерционная система управления, а информацию об одометрии колес получает внутренняя CAN шина Туарега. Компьютерная часть – это шесть мощных компьютеров Intel Pentium M с разными конфигурациями и операционными системами Линукс.
Стэнли наделена системой обнаружения приближающихся препятствий. Данные из лидаров скомбинированы с изображениями из визуальной системы, чтобы составить более полную картину обзора. Если приемлимую дорогу невозможно распознать хотя бы на ближайшие 40 метров, скорость снижается, а лидары ищут безопасный путь.
Кстати, вождение Стэнли программировали, пользуясь записью человеческого вождения в пустыне, а затем устанавливая точное значение каждому биту информации, создаваемой его системой сенсоров. После этой модификации машина-робот начала кататься со скоростью 45 миль в час по дорогам, пересеченным тенями деревьев. Пока точные значения для данных не были заданы, машина испуганно сворачивала с дороги, уверенная, что путь пересечен не тенями, а ямами.

BigDog: робот-мул
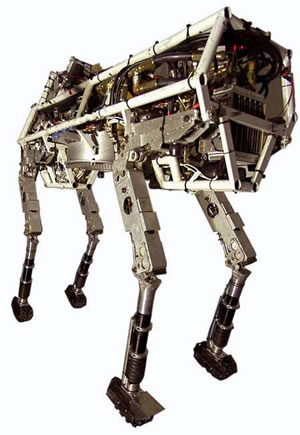
БогДог (BigDog, буквально – Большой Пес) – это четвероногий робот, созданный компанией Boston Dynamics в 2005 году. Проект БигДог финансировало Агентство защиты передовых исследований в надежде, что это создание сможет служить роботом-мулом для солдат на слишком грубой для транспорта местности.
БигДог весит 75 килограммов, он метровый в длину, а в высоты – 0, 7 метра. На данный момент он может путешествовать по тяжелой для передвижения местности со скоростью 5,3 км/ч, нести вес в 54 килограмма и карабкаться по склонам наклоном в 35 градусов.

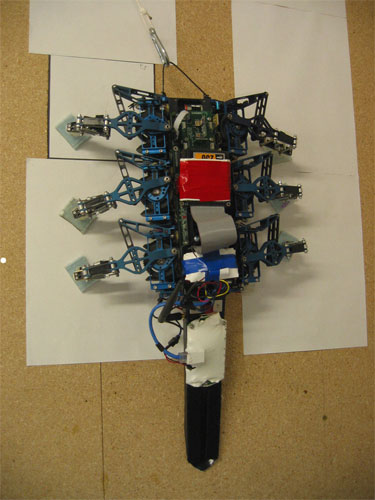
RiSE: карабкающийся робот

Райз (RiSE) – это маленький шестилапый робот, который забирается по вертикальным поверхностям: стенам, деревьям, заборам. На пятках Райза имеются когти, микрокогти или липкий материал, в зависимости от поверхности, по которой надо лазать. Робот меняет позы, чтобы приспособиться к наклону поверхности, а зафиксированный хвост помогает балансировать на крутых поверхностях. Малыш весит всего 2 килограмма, в длину составляет 0,25 метра, бегает со скоростью 0,3 м/с.
Каждая из шести лап робота оснащена двумя электромоторами. Бортовой компьютер управляет лапами, определяет способ коммуникации с землей и обсуживает разнообразные сенсоры. В том числе сенсор, рассчитывающий инертность, сенсор позиции сустава для каждой лапы, сенсор натяжения лап и датчик контакта ступней.
Будущие версии Райза будут использовать сухое прилипание, чтобы карабкаться по совершенно гладким отвесным поверхностям, таким как стекло и металл. Райз разработали совместно исследователи Пенсильванского университета, университетов Карнеги Меллон, Беркли, Стэнфорда, а также университета Льюиса и Кларка. Проект спонсировал Офис защиты науки DARPA.
QRIO: танцующий робот

QRIO ("Quest for cuRIOsity" – «Задача для любопытства») – это двуногий гуманоидный робот для развлечения, созданный и проданный Сони, чтобы не затухал успех их игрушки AIBO (робот-собачка). QRIO обладает ростом в 0,6 метра и весит 7,3 килограмма.
Робот умеет распознавать голоса и лица, благодаря чему может запоминать людей и их пристрастия и антипатии. Он умеет бегать со скоростью 23 см в секунду, что зафиксировано в Книге рекордов Гиннеса (2005 года) как первый, самый скоростной, двуногий робот, который бегает. Робот QRIO четвертого поколения работает от батареи час.
Четвертое поколение этих роботов умеет танцевать под Hell Yes, музыкальный клип исполнителя Beck. Эти экземпляры дополнены третьей камерой на лбу, и у них улучшили руки и запястья. Программисты работали три недели, чтобы обучить этих роботов хореографии.








Значение слова неудачный
Обзор Samsung Galaxy A7 (2017): не боится воды и экономии Стоит ли покупать samsung a7
Делаем бэкап прошивки на андроиде
Как настроить файл подкачки?
Установка режима совместимости в Windows